
Well the upgrades are done and the printer is working exceptionally well. As you can see, a lot has changed. This was a ridiculous process and took all of my free time for 3 weeks straight.
BL Touch
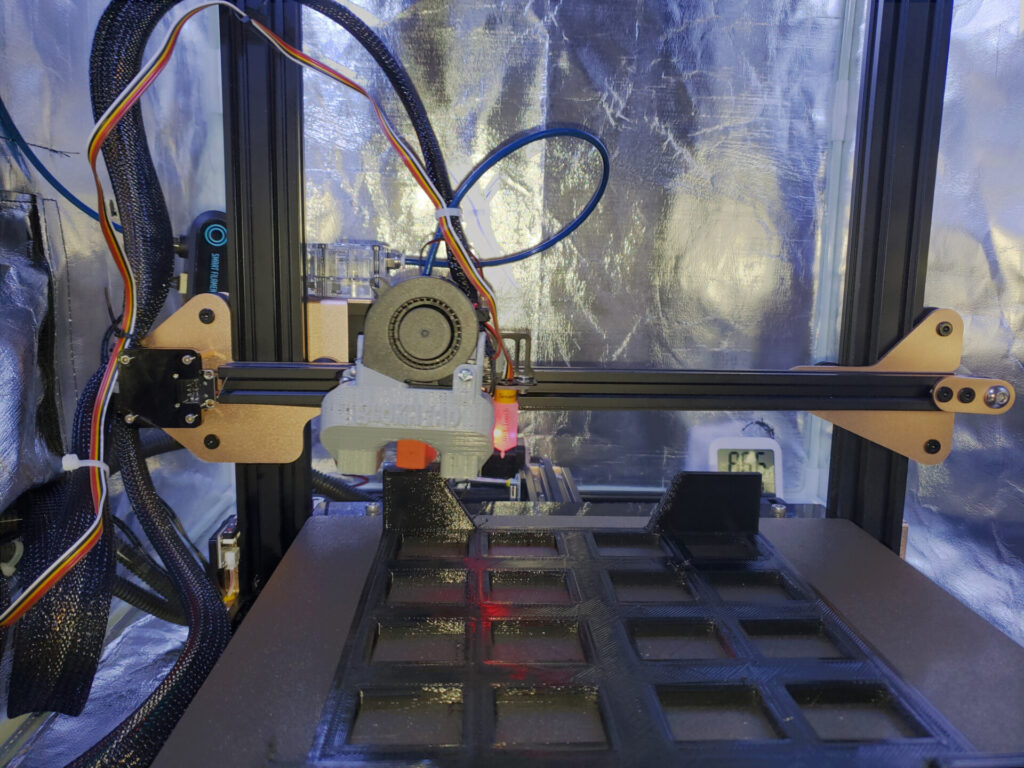
As you can see there’s a BL Touch on my carriage now. If you read part 2 you might be wondering where the Creality CR Touch went. Well I returned it because it didn’t work. The documentation and instructions are terrible. I couldn’t find a pinout anywhere. I found some random sources that claimed to know how to connect it to a BigTreeTech SKR 1.4 Turbo or similar variants. Well I’m afraid evidence suggests they had no idea what they were talking about. When I connected it, as suggested, I got that good old burning electronics smell. Apparently Creality doesn’t want you using their sensor on anything other than their boards. So bye bye CR Touch.
So I did some more research and decided to go with the original Creality knocked off, the BL Touch. If you ever head down this same path go with the BL Touch, it’s great. Unfortunately it’s opensource so the market is flooded with knock offs. I think I got a legit one but honestly I’m not even sure. If you can go with a real one.
Anyway it was fairly complicated to get it working correctly so here’s the highlights.
Set Up
First off almost nowhere that I found clearly stated this is a Z endstop replacement. The BTT SKR has a dedicated header for this sensor separate from the Z endstop header implying both can be used simultaneously. Maybe they can and I just didn’t work out how but if you think about it, it does make sense to replace the endstop, this does the same thing but better. So with TMC stepper drivers and an SKR and a BL Touch that’s a lot of modifications to get this working.
So once you get the hardware side sorted there’s still the firmware. This seems to be very poorly explained. There’s a ton of options that have to be turned on and adjusted. I’ll post my Marlin config files so you can spot the changes. Have a look at the VS Code “Compare” option quickly identify what is changed in my version versus yours.
Configuration.h
/**
* Marlin 3D Printer Firmware
* Copyright (c) 2020 MarlinFirmware [https://github.com/MarlinFirmware/Marlin]
*
* Based on Sprinter and grbl.
* Copyright (c) 2011 Camiel Gubbels / Erik van der Zalm
*
* This program is free software: you can redistribute it and/or modify
* it under the terms of the GNU General Public License as published by
* the Free Software Foundation, either version 3 of the License, or
* (at your option) any later version.
*
* This program is distributed in the hope that it will be useful,
* but WITHOUT ANY WARRANTY; without even the implied warranty of
* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
* GNU General Public License for more details.
*
* You should have received a copy of the GNU General Public License
* along with this program. If not, see <https://www.gnu.org/licenses/>.
*
*/
#pragma once
/**
* Configuration.h
*
* Basic settings such as:
*
* - Type of electronics
* - Type of temperature sensor
* - Printer geometry
* - Endstop configuration
* - LCD controller
* - Extra features
*
* Advanced settings can be found in Configuration_adv.h
*/
#define CONFIGURATION_H_VERSION 02010300
//===========================================================================
//============================= Getting Started =============================
//===========================================================================
/**
* Here are some useful links to help get your machine configured and calibrated:
*
* Example Configs: https://github.com/MarlinFirmware/Configurations/branches/all
*
* Průša Calculator: https://blog.prusaprinters.org/calculator_3416/
*
* Calibration Guides: https://reprap.org/wiki/Calibration
* https://reprap.org/wiki/Triffid_Hunter%27s_Calibration_Guide
* https://sites.google.com/site/repraplogphase/calibration-of-your-reprap
* https://youtu.be/wAL9d7FgInk
*
* Calibration Objects: https://www.thingiverse.com/thing:5573
* https://www.thingiverse.com/thing:1278865
*/
// @section info
// Author info of this build printed to the host during boot and M115
#define STRING_CONFIG_H_AUTHOR "(none, default config)" // Who made the changes.
//#define CUSTOM_VERSION_FILE Version.h // Path from the root directory (no quotes)
// @section machine
// Choose the name from boards.h that matches your setup
#ifndef MOTHERBOARD
#define MOTHERBOARD BOARD_BTT_SKR_V1_4_TURBO
#endif
/**
* Select the serial port on the board to use for communication with the host.
* This allows the connection of wireless adapters (for instance) to non-default port pins.
* Serial port -1 is the USB emulated serial port, if available.
* Note: The first serial port (-1 or 0) will always be used by the Arduino bootloader.
*
* :[-1, 0, 1, 2, 3, 4, 5, 6, 7]
*/
#define SERIAL_PORT -1
/**
* Serial Port Baud Rate
* This is the default communication speed for all serial ports.
* Set the baud rate defaults for additional serial ports below.
*
* 250000 works in most cases, but you might try a lower speed if
* you commonly experience drop-outs during host printing.
* You may try up to 1000000 to speed up SD file transfer.
*
* :[2400, 9600, 19200, 38400, 57600, 115200, 250000, 500000, 1000000]
*/
#define BAUDRATE 115200
//#define BAUD_RATE_GCODE // Enable G-code M575 to set the baud rate
/**
* Select a secondary serial port on the board to use for communication with the host.
* Currently Ethernet (-2) is only supported on Teensy 4.1 boards.
* :[-2, -1, 0, 1, 2, 3, 4, 5, 6, 7]
*/
#define SERIAL_PORT_2 0
#define BAUDRATE_2 115200 // :[2400, 9600, 19200, 38400, 57600, 115200, 250000, 500000, 1000000] Enable to override BAUDRATE
/**
* Select a third serial port on the board to use for communication with the host.
* Currently only supported for AVR, DUE, LPC1768/9 and STM32/STM32F1
* :[-1, 0, 1, 2, 3, 4, 5, 6, 7]
*/
//#define SERIAL_PORT_3 1
//#define BAUDRATE_3 250000 // :[2400, 9600, 19200, 38400, 57600, 115200, 250000, 500000, 1000000] Enable to override BAUDRATE
// Enable the Bluetooth serial interface on AT90USB devices
//#define BLUETOOTH
// Name displayed in the LCD "Ready" message and Info menu
//#define CUSTOM_MACHINE_NAME "3D Printer"
// Printer's unique ID, used by some programs to differentiate between machines.
// Choose your own or use a service like https://www.uuidgenerator.net/version4
//#define MACHINE_UUID "00000000-0000-0000-0000-000000000000"
// @section stepper drivers
/**
* Stepper Drivers
*
* These settings allow Marlin to tune stepper driver timing and enable advanced options for
* stepper drivers that support them. You may also override timing options in Configuration_adv.h.
*
* Use TMC2208/TMC2208_STANDALONE for TMC2225 drivers and TMC2209/TMC2209_STANDALONE for TMC2226 drivers.
*
* Options: A4988, A5984, DRV8825, LV8729, TB6560, TB6600, TMC2100,
* TMC2130, TMC2130_STANDALONE, TMC2160, TMC2160_STANDALONE,
* TMC2208, TMC2208_STANDALONE, TMC2209, TMC2209_STANDALONE,
* TMC26X, TMC26X_STANDALONE, TMC2660, TMC2660_STANDALONE,
* TMC5130, TMC5130_STANDALONE, TMC5160, TMC5160_STANDALONE
* :['A4988', 'A5984', 'DRV8825', 'LV8729', 'TB6560', 'TB6600', 'TMC2100', 'TMC2130', 'TMC2130_STANDALONE', 'TMC2160', 'TMC2160_STANDALONE', 'TMC2208', 'TMC2208_STANDALONE', 'TMC2209', 'TMC2209_STANDALONE', 'TMC26X', 'TMC26X_STANDALONE', 'TMC2660', 'TMC2660_STANDALONE', 'TMC5130', 'TMC5130_STANDALONE', 'TMC5160', 'TMC5160_STANDALONE']
*/
#define X_DRIVER_TYPE TMC2209
#define Y_DRIVER_TYPE TMC2209
#define Z_DRIVER_TYPE TMC2209
//#define X2_DRIVER_TYPE A4988
//#define Y2_DRIVER_TYPE A4988
//#define Z2_DRIVER_TYPE A4988
//#define Z3_DRIVER_TYPE A4988
//#define Z4_DRIVER_TYPE A4988
//#define I_DRIVER_TYPE A4988
//#define J_DRIVER_TYPE A4988
//#define K_DRIVER_TYPE A4988
//#define U_DRIVER_TYPE A4988
//#define V_DRIVER_TYPE A4988
//#define W_DRIVER_TYPE A4988
#define E0_DRIVER_TYPE TMC2209
//#define E1_DRIVER_TYPE A4988
//#define E2_DRIVER_TYPE A4988
//#define E3_DRIVER_TYPE A4988
//#define E4_DRIVER_TYPE A4988
//#define E5_DRIVER_TYPE A4988
//#define E6_DRIVER_TYPE A4988
//#define E7_DRIVER_TYPE A4988
/**
* Additional Axis Settings
*
* Define AXISn_ROTATES for all axes that rotate or pivot.
* Rotational axis coordinates are expressed in degrees.
*
* AXISn_NAME defines the letter used to refer to the axis in (most) G-code commands.
* By convention the names and roles are typically:
* 'A' : Rotational axis parallel to X
* 'B' : Rotational axis parallel to Y
* 'C' : Rotational axis parallel to Z
* 'U' : Secondary linear axis parallel to X
* 'V' : Secondary linear axis parallel to Y
* 'W' : Secondary linear axis parallel to Z
*
* Regardless of these settings the axes are internally named I, J, K, U, V, W.
*/
#ifdef I_DRIVER_TYPE
#define AXIS4_NAME 'A' // :['A', 'B', 'C', 'U', 'V', 'W']
#define AXIS4_ROTATES
#endif
#ifdef J_DRIVER_TYPE
#define AXIS5_NAME 'B' // :['B', 'C', 'U', 'V', 'W']
#define AXIS5_ROTATES
#endif
#ifdef K_DRIVER_TYPE
#define AXIS6_NAME 'C' // :['C', 'U', 'V', 'W']
#define AXIS6_ROTATES
#endif
#ifdef U_DRIVER_TYPE
#define AXIS7_NAME 'U' // :['U', 'V', 'W']
//#define AXIS7_ROTATES
#endif
#ifdef V_DRIVER_TYPE
#define AXIS8_NAME 'V' // :['V', 'W']
//#define AXIS8_ROTATES
#endif
#ifdef W_DRIVER_TYPE
#define AXIS9_NAME 'W' // :['W']
//#define AXIS9_ROTATES
#endif
// @section extruder
// This defines the number of extruders
// :[0, 1, 2, 3, 4, 5, 6, 7, 8]
#define EXTRUDERS 1
// Generally expected filament diameter (1.75, 2.85, 3.0, ...). Used for Volumetric, Filament Width Sensor, etc.
#define DEFAULT_NOMINAL_FILAMENT_DIA 1.75
// For Cyclops or any "multi-extruder" that shares a single nozzle.
//#define SINGLENOZZLE
// Save and restore temperature and fan speed on tool-change.
// Set standby for the unselected tool with M104/106/109 T...
#if ENABLED(SINGLENOZZLE)
//#define SINGLENOZZLE_STANDBY_TEMP
//#define SINGLENOZZLE_STANDBY_FAN
#endif
// A dual extruder that uses a single stepper motor
//#define SWITCHING_EXTRUDER
#if ENABLED(SWITCHING_EXTRUDER)
#define SWITCHING_EXTRUDER_SERVO_NR 0
#define SWITCHING_EXTRUDER_SERVO_ANGLES { 0, 90 } // Angles for E0, E1[, E2, E3]
#if EXTRUDERS > 3
#define SWITCHING_EXTRUDER_E23_SERVO_NR 1
#endif
#endif
// Switch extruders by bumping the toolhead. Requires EVENT_GCODE_TOOLCHANGE_#.
//#define MECHANICAL_SWITCHING_EXTRUDER
/**
* A dual-nozzle that uses a servomotor to raise/lower one (or both) of the nozzles.
* Can be combined with SWITCHING_EXTRUDER.
*/
//#define SWITCHING_NOZZLE
#if ENABLED(SWITCHING_NOZZLE)
#define SWITCHING_NOZZLE_SERVO_NR 0
//#define SWITCHING_NOZZLE_E1_SERVO_NR 1 // If two servos are used, the index of the second
#define SWITCHING_NOZZLE_SERVO_ANGLES { 0, 90 } // Angles for E0, E1 (single servo) or lowered/raised (dual servo)
#define SWITCHING_NOZZLE_SERVO_DWELL 2500 // Dwell time to wait for servo to make physical move
#endif
// Switch nozzles by bumping the toolhead. Requires EVENT_GCODE_TOOLCHANGE_#.
//#define MECHANICAL_SWITCHING_NOZZLE
/**
* Two separate X-carriages with extruders that connect to a moving part
* via a solenoid docking mechanism. Requires SOL1_PIN and SOL2_PIN.
*/
//#define PARKING_EXTRUDER
/**
* Two separate X-carriages with extruders that connect to a moving part
* via a magnetic docking mechanism using movements and no solenoid
*
* project : https://www.thingiverse.com/thing:3080893
* movements : https://youtu.be/0xCEiG9VS3k
* https://youtu.be/Bqbcs0CU2FE
*/
//#define MAGNETIC_PARKING_EXTRUDER
#if ANY(PARKING_EXTRUDER, MAGNETIC_PARKING_EXTRUDER)
#define PARKING_EXTRUDER_PARKING_X { -78, 184 } // X positions for parking the extruders
#define PARKING_EXTRUDER_GRAB_DISTANCE 1 // (mm) Distance to move beyond the parking point to grab the extruder
#if ENABLED(PARKING_EXTRUDER)
#define PARKING_EXTRUDER_SOLENOIDS_INVERT // If enabled, the solenoid is NOT magnetized with applied voltage
#define PARKING_EXTRUDER_SOLENOIDS_PINS_ACTIVE LOW // LOW or HIGH pin signal energizes the coil
#define PARKING_EXTRUDER_SOLENOIDS_DELAY 250 // (ms) Delay for magnetic field. No delay if 0 or not defined.
//#define MANUAL_SOLENOID_CONTROL // Manual control of docking solenoids with M380 S / M381
#elif ENABLED(MAGNETIC_PARKING_EXTRUDER)
#define MPE_FAST_SPEED 9000 // (mm/min) Speed for travel before last distance point
#define MPE_SLOW_SPEED 4500 // (mm/min) Speed for last distance travel to park and couple
#define MPE_TRAVEL_DISTANCE 10 // (mm) Last distance point
#define MPE_COMPENSATION 0 // Offset Compensation -1 , 0 , 1 (multiplier) only for coupling
#endif
#endif
/**
* Switching Toolhead
*
* Support for swappable and dockable toolheads, such as
* the E3D Tool Changer. Toolheads are locked with a servo.
*/
//#define SWITCHING_TOOLHEAD
/**
* Magnetic Switching Toolhead
*
* Support swappable and dockable toolheads with a magnetic
* docking mechanism using movement and no servo.
*/
//#define MAGNETIC_SWITCHING_TOOLHEAD
/**
* Electromagnetic Switching Toolhead
*
* Parking for CoreXY / HBot kinematics.
* Toolheads are parked at one edge and held with an electromagnet.
* Supports more than 2 Toolheads. See https://youtu.be/JolbsAKTKf4
*/
//#define ELECTROMAGNETIC_SWITCHING_TOOLHEAD
#if ANY(SWITCHING_TOOLHEAD, MAGNETIC_SWITCHING_TOOLHEAD, ELECTROMAGNETIC_SWITCHING_TOOLHEAD)
#define SWITCHING_TOOLHEAD_Y_POS 235 // (mm) Y position of the toolhead dock
#define SWITCHING_TOOLHEAD_Y_SECURITY 10 // (mm) Security distance Y axis
#define SWITCHING_TOOLHEAD_Y_CLEAR 60 // (mm) Minimum distance from dock for unobstructed X axis
#define SWITCHING_TOOLHEAD_X_POS { 215, 0 } // (mm) X positions for parking the extruders
#if ENABLED(SWITCHING_TOOLHEAD)
#define SWITCHING_TOOLHEAD_SERVO_NR 2 // Index of the servo connector
#define SWITCHING_TOOLHEAD_SERVO_ANGLES { 0, 180 } // (degrees) Angles for Lock, Unlock
#elif ENABLED(MAGNETIC_SWITCHING_TOOLHEAD)
#define SWITCHING_TOOLHEAD_Y_RELEASE 5 // (mm) Security distance Y axis
#define SWITCHING_TOOLHEAD_X_SECURITY { 90, 150 } // (mm) Security distance X axis (T0,T1)
//#define PRIME_BEFORE_REMOVE // Prime the nozzle before release from the dock
#if ENABLED(PRIME_BEFORE_REMOVE)
#define SWITCHING_TOOLHEAD_PRIME_MM 20 // (mm) Extruder prime length
#define SWITCHING_TOOLHEAD_RETRACT_MM 10 // (mm) Retract after priming length
#define SWITCHING_TOOLHEAD_PRIME_FEEDRATE 300 // (mm/min) Extruder prime feedrate
#define SWITCHING_TOOLHEAD_RETRACT_FEEDRATE 2400 // (mm/min) Extruder retract feedrate
#endif
#elif ENABLED(ELECTROMAGNETIC_SWITCHING_TOOLHEAD)
#define SWITCHING_TOOLHEAD_Z_HOP 2 // (mm) Z raise for switching
#endif
#endif
/**
* "Mixing Extruder"
* - Adds G-codes M163 and M164 to set and "commit" the current mix factors.
* - Extends the stepping routines to move multiple steppers in proportion to the mix.
* - Optional support for Repetier Firmware's 'M164 S<index>' supporting virtual tools.
* - This implementation supports up to two mixing extruders.
* - Enable DIRECT_MIXING_IN_G1 for M165 and mixing in G1 (from Pia Taubert's reference implementation).
*/
//#define MIXING_EXTRUDER
#if ENABLED(MIXING_EXTRUDER)
#define MIXING_STEPPERS 2 // Number of steppers in your mixing extruder
#define MIXING_VIRTUAL_TOOLS 16 // Use the Virtual Tool method with M163 and M164
//#define DIRECT_MIXING_IN_G1 // Allow ABCDHI mix factors in G1 movement commands
//#define GRADIENT_MIX // Support for gradient mixing with M166 and LCD
//#define MIXING_PRESETS // Assign 8 default V-tool presets for 2 or 3 MIXING_STEPPERS
#if ENABLED(GRADIENT_MIX)
//#define GRADIENT_VTOOL // Add M166 T to use a V-tool index as a Gradient alias
#endif
#endif
// Offset of the extruders (uncomment if using more than one and relying on firmware to position when changing).
// The offset has to be X=0, Y=0 for the extruder 0 hotend (default extruder).
// For the other hotends it is their distance from the extruder 0 hotend.
//#define HOTEND_OFFSET_X { 0.0, 20.00 } // (mm) relative X-offset for each nozzle
//#define HOTEND_OFFSET_Y { 0.0, 5.00 } // (mm) relative Y-offset for each nozzle
//#define HOTEND_OFFSET_Z { 0.0, 0.00 } // (mm) relative Z-offset for each nozzle
// @section multi-material
/**
* Multi-Material Unit
* Set to one of these predefined models:
*
* PRUSA_MMU1 : Průša MMU1 (The "multiplexer" version)
* PRUSA_MMU2 : Průša MMU2
* PRUSA_MMU2S : Průša MMU2S (Requires MK3S extruder with motion sensor, EXTRUDERS = 5)
* EXTENDABLE_EMU_MMU2 : MMU with configurable number of filaments (ERCF, SMuFF or similar with Průša MMU2 compatible firmware)
* EXTENDABLE_EMU_MMU2S : MMUS with configurable number of filaments (ERCF, SMuFF or similar with Průša MMU2 compatible firmware)
*
* Requires NOZZLE_PARK_FEATURE to park print head in case MMU unit fails.
* See additional options in Configuration_adv.h.
* :["PRUSA_MMU1", "PRUSA_MMU2", "PRUSA_MMU2S", "EXTENDABLE_EMU_MMU2", "EXTENDABLE_EMU_MMU2S"]
*/
//#define MMU_MODEL PRUSA_MMU2
// @section psu control
/**
* Power Supply Control
*
* Enable and connect the power supply to the PS_ON_PIN.
* Specify whether the power supply is active HIGH or active LOW.
*/
//#define PSU_CONTROL
//#define PSU_NAME "Power Supply"
#if ENABLED(PSU_CONTROL)
//#define MKS_PWC // Using the MKS PWC add-on
//#define PS_OFF_CONFIRM // Confirm dialog when power off
//#define PS_OFF_SOUND // Beep 1s when power off
#define PSU_ACTIVE_STATE LOW // Set 'LOW' for ATX, 'HIGH' for X-Box
//#define PSU_DEFAULT_OFF // Keep power off until enabled directly with M80
//#define PSU_POWERUP_DELAY 250 // (ms) Delay for the PSU to warm up to full power
//#define LED_POWEROFF_TIMEOUT 10000 // (ms) Turn off LEDs after power-off, with this amount of delay
//#define POWER_OFF_TIMER // Enable M81 D<seconds> to power off after a delay
//#define POWER_OFF_WAIT_FOR_COOLDOWN // Enable M81 S to power off only after cooldown
//#define PSU_POWERUP_GCODE "M355 S1" // G-code to run after power-on (e.g., case light on)
//#define PSU_POWEROFF_GCODE "M355 S0" // G-code to run before power-off (e.g., case light off)
//#define AUTO_POWER_CONTROL // Enable automatic control of the PS_ON pin
#if ENABLED(AUTO_POWER_CONTROL)
#define AUTO_POWER_FANS // Turn on PSU if fans need power
#define AUTO_POWER_E_FANS
#define AUTO_POWER_CONTROLLERFAN
#define AUTO_POWER_CHAMBER_FAN
#define AUTO_POWER_COOLER_FAN
#define POWER_TIMEOUT 30 // (s) Turn off power if the machine is idle for this duration
//#define POWER_OFF_DELAY 60 // (s) Delay of poweroff after M81 command. Useful to let fans run for extra time.
#endif
#if ANY(AUTO_POWER_CONTROL, POWER_OFF_WAIT_FOR_COOLDOWN)
//#define AUTO_POWER_E_TEMP 50 // (°C) PSU on if any extruder is over this temperature
//#define AUTO_POWER_CHAMBER_TEMP 30 // (°C) PSU on if the chamber is over this temperature
//#define AUTO_POWER_COOLER_TEMP 26 // (°C) PSU on if the cooler is over this temperature
#endif
#endif
//===========================================================================
//============================= Thermal Settings ============================
//===========================================================================
// @section temperature
/**
* Temperature Sensors:
*
* NORMAL IS 4.7kΩ PULLUP! Hotend sensors can use 1kΩ pullup with correct resistor and table.
*
* ================================================================
* Analog Thermistors - 4.7kΩ pullup - Normal
* ================================================================
* 1 : 100kΩ EPCOS - Best choice for EPCOS thermistors
* 331 : 100kΩ Same as #1, but 3.3V scaled for MEGA
* 332 : 100kΩ Same as #1, but 3.3V scaled for DUE
* 2 : 200kΩ ATC Semitec 204GT-2
* 202 : 200kΩ Copymaster 3D
* 3 : ???Ω Mendel-parts thermistor
* 4 : 10kΩ Generic Thermistor !! DO NOT use for a hotend - it gives bad resolution at high temp. !!
* 5 : 100kΩ ATC Semitec 104GT-2/104NT-4-R025H42G - Used in ParCan, J-Head, and E3D, SliceEngineering 300°C
* 501 : 100kΩ Zonestar - Tronxy X3A
* 502 : 100kΩ Zonestar - used by hot bed in Zonestar Průša P802M
* 503 : 100kΩ Zonestar (Z8XM2) Heated Bed thermistor
* 504 : 100kΩ Zonestar P802QR2 (Part# QWG-104F-B3950) Hotend Thermistor
* 505 : 100kΩ Zonestar P802QR2 (Part# QWG-104F-3950) Bed Thermistor
* 512 : 100kΩ RPW-Ultra hotend
* 6 : 100kΩ EPCOS - Not as accurate as table #1 (created using a fluke thermocouple)
* 7 : 100kΩ Honeywell 135-104LAG-J01
* 71 : 100kΩ Honeywell 135-104LAF-J01
* 8 : 100kΩ Vishay 0603 SMD NTCS0603E3104FXT
* 9 : 100kΩ GE Sensing AL03006-58.2K-97-G1
* 10 : 100kΩ RS PRO 198-961
* 11 : 100kΩ Keenovo AC silicone mats, most Wanhao i3 machines - beta 3950, 1%
* 12 : 100kΩ Vishay 0603 SMD NTCS0603E3104FXT (#8) - calibrated for Makibox hot bed
* 13 : 100kΩ Hisens up to 300°C - for "Simple ONE" & "All In ONE" hotend - beta 3950, 1%
* 14 : 100kΩ (R25), 4092K (beta25), 4.7kΩ pull-up, bed thermistor as used in Ender-5 S1
* 15 : 100kΩ Calibrated for JGAurora A5 hotend
* 18 : 200kΩ ATC Semitec 204GT-2 Dagoma.Fr - MKS_Base_DKU001327
* 22 : 100kΩ GTM32 Pro vB - hotend - 4.7kΩ pullup to 3.3V and 220Ω to analog input
* 23 : 100kΩ GTM32 Pro vB - bed - 4.7kΩ pullup to 3.3v and 220Ω to analog input
* 30 : 100kΩ Kis3d Silicone heating mat 200W/300W with 6mm precision cast plate (EN AW 5083) NTC100K - beta 3950
* 60 : 100kΩ Maker's Tool Works Kapton Bed Thermistor - beta 3950
* 61 : 100kΩ Formbot/Vivedino 350°C Thermistor - beta 3950
* 66 : 4.7MΩ Dyze Design / Trianglelab T-D500 500°C High Temperature Thermistor
* 67 : 500kΩ SliceEngineering 450°C Thermistor
* 68 : PT100 Smplifier board from Dyze Design
* 70 : 100kΩ bq Hephestos 2
* 75 : 100kΩ Generic Silicon Heat Pad with NTC100K MGB18-104F39050L32
* 2000 : 100kΩ Ultimachine Rambo TDK NTCG104LH104KT1 NTC100K motherboard Thermistor
*
* ================================================================
* Analog Thermistors - 1kΩ pullup
* Atypical, and requires changing out the 4.7kΩ pullup for 1kΩ.
* (but gives greater accuracy and more stable PID)
* ================================================================
* 51 : 100kΩ EPCOS (1kΩ pullup)
* 52 : 200kΩ ATC Semitec 204GT-2 (1kΩ pullup)
* 55 : 100kΩ ATC Semitec 104GT-2 - Used in ParCan & J-Head (1kΩ pullup)
*
* ================================================================
* Analog Thermistors - 10kΩ pullup - Atypical
* ================================================================
* 99 : 100kΩ Found on some Wanhao i3 machines with a 10kΩ pull-up resistor
*
* ================================================================
* Analog RTDs (Pt100/Pt1000)
* ================================================================
* 110 : Pt100 with 1kΩ pullup (atypical)
* 147 : Pt100 with 4.7kΩ pullup
* 1010 : Pt1000 with 1kΩ pullup (atypical)
* 1022 : Pt1000 with 2.2kΩ pullup
* 1047 : Pt1000 with 4.7kΩ pullup (E3D)
* 20 : Pt100 with circuit in the Ultimainboard V2.x with mainboard ADC reference voltage = INA826 amplifier-board supply voltage.
* NOTE: (1) Must use an ADC input with no pullup. (2) Some INA826 amplifiers are unreliable at 3.3V so consider using sensor 147, 110, or 21.
* 21 : Pt100 with circuit in the Ultimainboard V2.x with 3.3v ADC reference voltage (STM32, LPC176x....) and 5V INA826 amplifier board supply.
* NOTE: ADC pins are not 5V tolerant. Not recommended because it's possible to damage the CPU by going over 500°C.
* 201 : Pt100 with circuit in Overlord, similar to Ultimainboard V2.x
*
* ================================================================
* SPI RTD/Thermocouple Boards
* ================================================================
* -5 : MAX31865 with Pt100/Pt1000, 2, 3, or 4-wire (only for sensors 0-1)
* NOTE: You must uncomment/set the MAX31865_*_OHMS_n defines below.
* -3 : MAX31855 with Thermocouple, -200°C to +700°C (only for sensors 0-1)
* -2 : MAX6675 with Thermocouple, 0°C to +700°C (only for sensors 0-1)
*
* NOTE: Ensure TEMP_n_CS_PIN is set in your pins file for each TEMP_SENSOR_n using an SPI Thermocouple. By default,
* Hardware SPI on the default serial bus is used. If you have also set TEMP_n_SCK_PIN and TEMP_n_MISO_PIN,
* Software SPI will be used on those ports instead. You can force Hardware SPI on the default bus in the
* Configuration_adv.h file. At this time, separate Hardware SPI buses for sensors are not supported.
*
* ================================================================
* Analog Thermocouple Boards
* ================================================================
* -4 : AD8495 with Thermocouple
* -1 : AD595 with Thermocouple
*
* ================================================================
* SoC internal sensor
* ================================================================
* 100 : SoC internal sensor
*
* ================================================================
* Custom/Dummy/Other Thermal Sensors
* ================================================================
* 0 : not used
* 1000 : Custom - Specify parameters in Configuration_adv.h
*
* !!! Use these for Testing or Development purposes. NEVER for production machine. !!!
* 998 : Dummy Table that ALWAYS reads 25°C or the temperature defined below.
* 999 : Dummy Table that ALWAYS reads 100°C or the temperature defined below.
*/
#define TEMP_SENSOR_0 1047
#define TEMP_SENSOR_1 0
#define TEMP_SENSOR_2 0
#define TEMP_SENSOR_3 0
#define TEMP_SENSOR_4 0
#define TEMP_SENSOR_5 0
#define TEMP_SENSOR_6 0
#define TEMP_SENSOR_7 0
#define TEMP_SENSOR_BED 1
#define TEMP_SENSOR_PROBE 0
#define TEMP_SENSOR_CHAMBER 0
#define TEMP_SENSOR_COOLER 0
#define TEMP_SENSOR_BOARD 0
#define TEMP_SENSOR_SOC 0
#define TEMP_SENSOR_REDUNDANT 0
// Dummy thermistor constant temperature readings, for use with 998 and 999
#define DUMMY_THERMISTOR_998_VALUE 25
#define DUMMY_THERMISTOR_999_VALUE 100
// Resistor values when using MAX31865 sensors (-5) on TEMP_SENSOR_0 / 1
#if TEMP_SENSOR_IS_MAX_TC(0)
#define MAX31865_SENSOR_OHMS_0 100 // (Ω) Typically 100 or 1000 (PT100 or PT1000)
#define MAX31865_CALIBRATION_OHMS_0 430 // (Ω) Typically 430 for Adafruit PT100; 4300 for Adafruit PT1000
#endif
#if TEMP_SENSOR_IS_MAX_TC(1)
#define MAX31865_SENSOR_OHMS_1 100
#define MAX31865_CALIBRATION_OHMS_1 430
#endif
#if TEMP_SENSOR_IS_MAX_TC(2)
#define MAX31865_SENSOR_OHMS_2 100
#define MAX31865_CALIBRATION_OHMS_2 430
#endif
#if HAS_E_TEMP_SENSOR
#define TEMP_RESIDENCY_TIME 10 // (seconds) Time to wait for hotend to "settle" in M109
#define TEMP_WINDOW 1 // (°C) Temperature proximity for the "temperature reached" timer
#define TEMP_HYSTERESIS 3 // (°C) Temperature proximity considered "close enough" to the target
#endif
#if TEMP_SENSOR_BED
#define TEMP_BED_RESIDENCY_TIME 10 // (seconds) Time to wait for bed to "settle" in M190
#define TEMP_BED_WINDOW 1 // (°C) Temperature proximity for the "temperature reached" timer
#define TEMP_BED_HYSTERESIS 3 // (°C) Temperature proximity considered "close enough" to the target
#endif
#if TEMP_SENSOR_CHAMBER
#define TEMP_CHAMBER_RESIDENCY_TIME 10 // (seconds) Time to wait for chamber to "settle" in M191
#define TEMP_CHAMBER_WINDOW 1 // (°C) Temperature proximity for the "temperature reached" timer
#define TEMP_CHAMBER_HYSTERESIS 3 // (°C) Temperature proximity considered "close enough" to the target
#endif
/**
* Redundant Temperature Sensor (TEMP_SENSOR_REDUNDANT)
*
* Use a temp sensor as a redundant sensor for another reading. Select an unused temperature sensor, and another
* sensor you'd like it to be redundant for. If the two thermistors differ by TEMP_SENSOR_REDUNDANT_MAX_DIFF (°C),
* the print will be aborted. Whichever sensor is selected will have its normal functions disabled; i.e. selecting
* the Bed sensor (-1) will disable bed heating/monitoring.
*
* For selecting source/target use: COOLER, PROBE, BOARD, CHAMBER, BED, E0, E1, E2, E3, E4, E5, E6, E7
*/
#if TEMP_SENSOR_REDUNDANT
#define TEMP_SENSOR_REDUNDANT_SOURCE E1 // The sensor that will provide the redundant reading.
#define TEMP_SENSOR_REDUNDANT_TARGET E0 // The sensor that we are providing a redundant reading for.
#define TEMP_SENSOR_REDUNDANT_MAX_DIFF 10 // (°C) Temperature difference that will trigger a print abort.
#endif
// Below this temperature the heater will be switched off
// because it probably indicates a broken thermistor wire.
#define HEATER_0_MINTEMP 5
#define HEATER_1_MINTEMP 5
#define HEATER_2_MINTEMP 5
#define HEATER_3_MINTEMP 5
#define HEATER_4_MINTEMP 5
#define HEATER_5_MINTEMP 5
#define HEATER_6_MINTEMP 5
#define HEATER_7_MINTEMP 5
#define BED_MINTEMP 5
#define CHAMBER_MINTEMP 5
// Above this temperature the heater will be switched off.
// This can protect components from overheating, but NOT from shorts and failures.
// (Use MINTEMP for thermistor short/failure protection.)
#define HEATER_0_MAXTEMP 500
#define HEATER_1_MAXTEMP 275
#define HEATER_2_MAXTEMP 275
#define HEATER_3_MAXTEMP 275
#define HEATER_4_MAXTEMP 275
#define HEATER_5_MAXTEMP 275
#define HEATER_6_MAXTEMP 275
#define HEATER_7_MAXTEMP 275
#define BED_MAXTEMP 150
#define CHAMBER_MAXTEMP 150
/**
* Thermal Overshoot
* During heatup (and printing) the temperature can often "overshoot" the target by many degrees
* (especially before PID tuning). Setting the target temperature too close to MAXTEMP guarantees
* a MAXTEMP shutdown! Use these values to forbid temperatures being set too close to MAXTEMP.
*/
#define HOTEND_OVERSHOOT 30 // (°C) Forbid temperatures over MAXTEMP - OVERSHOOT
#define BED_OVERSHOOT 20 // (°C) Forbid temperatures over MAXTEMP - OVERSHOOT
#define COOLER_OVERSHOOT 2 // (°C) Forbid temperatures closer than OVERSHOOT
//===========================================================================
//============================= PID Settings ================================
//===========================================================================
// @section hotend temp
/**
* Temperature Control
*
* (NONE) : Bang-bang heating
* PIDTEMP : PID temperature control (~4.1K)
* MPCTEMP : Predictive Model temperature control. (~1.8K without auto-tune)
*/
#define PIDTEMP // See the PID Tuning Guide at https://reprap.org/wiki/PID_Tuning
//#define MPCTEMP // ** EXPERIMENTAL ** See https://marlinfw.org/docs/features/model_predictive_control.html
#define PID_MAX 255 // Limit hotend current while PID is active (see PID_FUNCTIONAL_RANGE below); 255=full current
#define PID_K1 0.95 // Smoothing factor within any PID loop
#if ENABLED(PIDTEMP)
//#define PID_DEBUG // Print PID debug data to the serial port. Use 'M303 D' to toggle activation.
//#define PID_PARAMS_PER_HOTEND // Use separate PID parameters for each extruder (useful for mismatched extruders)
// Set/get with G-code: M301 E[extruder number, 0-2]
#if ENABLED(PID_PARAMS_PER_HOTEND)
// Specify up to one value per hotend here, according to your setup.
// If there are fewer values, the last one applies to the remaining hotends.
#define DEFAULT_Kp_LIST { 22.20, 22.20 }
#define DEFAULT_Ki_LIST { 1.08, 1.08 }
#define DEFAULT_Kd_LIST { 114.00, 114.00 }
#else
#define DEFAULT_Kp 22.20
#define DEFAULT_Ki 1.08
#define DEFAULT_Kd 114.00
#endif
#else
#define BANG_MAX 255 // Limit hotend current while in bang-bang mode; 255=full current
#endif
/**
* Model Predictive Control for hotend
*
* Use a physical model of the hotend to control temperature. When configured correctly
* this gives better responsiveness and stability than PID and it also removes the need
* for PID_EXTRUSION_SCALING and PID_FAN_SCALING. Use M306 T to autotune the model.
* @section mpctemp
*/
#if ENABLED(MPCTEMP)
//#define MPC_AUTOTUNE // Include a method to do MPC auto-tuning (~6.3K bytes of flash)
//#define MPC_EDIT_MENU // Add MPC editing to the "Advanced Settings" menu. (~1.3K bytes of flash)
//#define MPC_AUTOTUNE_MENU // Add MPC auto-tuning to the "Advanced Settings" menu. (~350 bytes of flash)
#define MPC_MAX 255 // (0..255) Current to nozzle while MPC is active.
#define MPC_HEATER_POWER { 40.0f } // (W) Heat cartridge powers.
#define MPC_INCLUDE_FAN // Model the fan speed?
// Measured physical constants from M306
#define MPC_BLOCK_HEAT_CAPACITY { 16.7f } // (J/K) Heat block heat capacities.
#define MPC_SENSOR_RESPONSIVENESS { 0.22f } // (K/s per ∆K) Rate of change of sensor temperature from heat block.
#define MPC_AMBIENT_XFER_COEFF { 0.068f } // (W/K) Heat transfer coefficients from heat block to room air with fan off.
#if ENABLED(MPC_INCLUDE_FAN)
#define MPC_AMBIENT_XFER_COEFF_FAN255 { 0.097f } // (W/K) Heat transfer coefficients from heat block to room air with fan on full.
#endif
// For one fan and multiple hotends MPC needs to know how to apply the fan cooling effect.
#if ENABLED(MPC_INCLUDE_FAN)
//#define MPC_FAN_0_ALL_HOTENDS
//#define MPC_FAN_0_ACTIVE_HOTEND
#endif
#define FILAMENT_HEAT_CAPACITY_PERMM { 5.6e-3f } // 0.0056 J/K/mm for 1.75mm PLA (0.0149 J/K/mm for 2.85mm PLA).
//#define FILAMENT_HEAT_CAPACITY_PERMM { 3.6e-3f } // 0.0036 J/K/mm for 1.75mm PETG (0.0094 J/K/mm for 2.85mm PETG).
// Advanced options
#define MPC_SMOOTHING_FACTOR 0.5f // (0.0...1.0) Noisy temperature sensors may need a lower value for stabilization.
#define MPC_MIN_AMBIENT_CHANGE 1.0f // (K/s) Modeled ambient temperature rate of change, when correcting model inaccuracies.
#define MPC_STEADYSTATE 0.5f // (K/s) Temperature change rate for steady state logic to be enforced.
#define MPC_TUNING_POS { X_CENTER, Y_CENTER, 1.0f } // (mm) M306 Autotuning position, ideally bed center at first layer height.
#define MPC_TUNING_END_Z 10.0f // (mm) M306 Autotuning final Z position.
#endif
//===========================================================================
//====================== PID > Bed Temperature Control ======================
//===========================================================================
// @section bed temp
/**
* Max Bed Power
* Applies to all forms of bed control (PID, bang-bang, and bang-bang with hysteresis).
* When set to any value below 255, enables a form of PWM to the bed that acts like a divider
* so don't use it unless you are OK with PWM on your bed. (See the comment on enabling PIDTEMPBED)
*/
#define MAX_BED_POWER 255 // limits duty cycle to bed; 255=full current
/**
* PID Bed Heating
*
* The PID frequency will be the same as the extruder PWM.
* If PID_dT is the default, and correct for the hardware/configuration, that means 7.689Hz,
* which is fine for driving a square wave into a resistive load and does not significantly
* impact FET heating. This also works fine on a Fotek SSR-10DA Solid State Relay into a 250W
* heater. If your configuration is significantly different than this and you don't understand
* the issues involved, don't use bed PID until someone else verifies that your hardware works.
*
* With this option disabled, bang-bang will be used. BED_LIMIT_SWITCHING enables hysteresis.
*/
#define PIDTEMPBED
#if ENABLED(PIDTEMPBED)
//#define MIN_BED_POWER 0
//#define PID_BED_DEBUG // Print Bed PID debug data to the serial port.
// 120V 250W silicone heater into 4mm borosilicate (MendelMax 1.5+)
// from FOPDT model - kp=.39 Tp=405 Tdead=66, Tc set to 79.2, aggressive factor of .15 (vs .1, 1, 10)
#define DEFAULT_bedKp 10.00
#define DEFAULT_bedKi .023
#define DEFAULT_bedKd 305.4
// FIND YOUR OWN: "M303 E-1 C8 S90" to run autotune on the bed at 90 degreesC for 8 cycles.
#else
//#define BED_LIMIT_SWITCHING // Keep the bed temperature within BED_HYSTERESIS of the target
#endif
//===========================================================================
//==================== PID > Chamber Temperature Control ====================
//===========================================================================
/**
* PID Chamber Heating
*
* If this option is enabled set PID constants below.
* If this option is disabled, bang-bang will be used and CHAMBER_LIMIT_SWITCHING will enable
* hysteresis.
*
* The PID frequency will be the same as the extruder PWM.
* If PID_dT is the default, and correct for the hardware/configuration, that means 7.689Hz,
* which is fine for driving a square wave into a resistive load and does not significantly
* impact FET heating. This also works fine on a Fotek SSR-10DA Solid State Relay into a 200W
* heater. If your configuration is significantly different than this and you don't understand
* the issues involved, don't use chamber PID until someone else verifies that your hardware works.
* @section chamber temp
*/
//#define PIDTEMPCHAMBER
//#define CHAMBER_LIMIT_SWITCHING
/**
* Max Chamber Power
* Applies to all forms of chamber control (PID, bang-bang, and bang-bang with hysteresis).
* When set to any value below 255, enables a form of PWM to the chamber heater that acts like a divider
* so don't use it unless you are OK with PWM on your heater. (See the comment on enabling PIDTEMPCHAMBER)
*/
#define MAX_CHAMBER_POWER 255 // limits duty cycle to chamber heater; 255=full current
#if ENABLED(PIDTEMPCHAMBER)
#define MIN_CHAMBER_POWER 0
//#define PID_CHAMBER_DEBUG // Print Chamber PID debug data to the serial port.
// Lasko "MyHeat Personal Heater" (200w) modified with a Fotek SSR-10DA to control only the heating element
// and placed inside the small Creality printer enclosure tent.
//
#define DEFAULT_chamberKp 37.04
#define DEFAULT_chamberKi 1.40
#define DEFAULT_chamberKd 655.17
// M309 P37.04 I1.04 D655.17
// FIND YOUR OWN: "M303 E-2 C8 S50" to run autotune on the chamber at 50 degreesC for 8 cycles.
#endif // PIDTEMPCHAMBER
#if ANY(PIDTEMP, PIDTEMPBED, PIDTEMPCHAMBER)
//#define PID_OPENLOOP // Puts PID in open loop. M104/M140 sets the output power from 0 to PID_MAX
//#define SLOW_PWM_HEATERS // PWM with very low frequency (roughly 0.125Hz=8s) and minimum state time of approximately 1s useful for heaters driven by a relay
#define PID_FUNCTIONAL_RANGE 10 // If the temperature difference between the target temperature and the actual temperature
// is more than PID_FUNCTIONAL_RANGE then the PID will be shut off and the heater will be set to min/max.
//#define PID_EDIT_MENU // Add PID editing to the "Advanced Settings" menu. (~700 bytes of flash)
//#define PID_AUTOTUNE_MENU // Add PID auto-tuning to the "Advanced Settings" menu. (~250 bytes of flash)
#endif
// @section safety
/**
* Prevent extrusion if the temperature is below EXTRUDE_MINTEMP.
* Add M302 to set the minimum extrusion temperature and/or turn
* cold extrusion prevention on and off.
*
* *** IT IS HIGHLY RECOMMENDED TO LEAVE THIS OPTION ENABLED! ***
*/
#define PREVENT_COLD_EXTRUSION
#define EXTRUDE_MINTEMP 170
/**
* Prevent a single extrusion longer than EXTRUDE_MAXLENGTH.
* Note: For Bowden Extruders make this large enough to allow load/unload.
*/
#define PREVENT_LENGTHY_EXTRUDE
#define EXTRUDE_MAXLENGTH 200
//===========================================================================
//======================== Thermal Runaway Protection =======================
//===========================================================================
/**
* Thermal Protection provides additional protection to your printer from damage
* and fire. Marlin always includes safe min and max temperature ranges which
* protect against a broken or disconnected thermistor wire.
*
* The issue: If a thermistor falls out, it will report the much lower
* temperature of the air in the room, and the the firmware will keep
* the heater on.
*
* If you get "Thermal Runaway" or "Heating failed" errors the
* details can be tuned in Configuration_adv.h
*/
#define THERMAL_PROTECTION_HOTENDS // Enable thermal protection for all extruders
#define THERMAL_PROTECTION_BED // Enable thermal protection for the heated bed
#define THERMAL_PROTECTION_CHAMBER // Enable thermal protection for the heated chamber
#define THERMAL_PROTECTION_COOLER // Enable thermal protection for the laser cooling
//===========================================================================
//============================= Mechanical Settings =========================
//===========================================================================
// @section machine
// Enable one of the options below for CoreXY, CoreXZ, or CoreYZ kinematics,
// either in the usual order or reversed
//#define COREXY
//#define COREXZ
//#define COREYZ
//#define COREYX
//#define COREZX
//#define COREZY
//#define MARKFORGED_XY // MarkForged. See https://reprap.org/forum/read.php?152,504042
//#define MARKFORGED_YX
// Enable for a belt style printer with endless "Z" motion
//#define BELTPRINTER
// Enable for Polargraph Kinematics
//#define POLARGRAPH
#if ENABLED(POLARGRAPH)
#define POLARGRAPH_MAX_BELT_LEN 1035.0 // (mm) Belt length at full extension. Override with M665 H.
#define DEFAULT_SEGMENTS_PER_SECOND 5 // Move segmentation based on duration
#define PEN_UP_DOWN_MENU // Add "Pen Up" and "Pen Down" to the MarlinUI menu
#endif
// @section delta
// Enable for DELTA kinematics and configure below
//#define DELTA
#if ENABLED(DELTA)
// Make delta curves from many straight lines (linear interpolation).
// This is a trade-off between visible corners (not enough segments)
// and processor overload (too many expensive sqrt calls).
#define DEFAULT_SEGMENTS_PER_SECOND 200
// After homing move down to a height where XY movement is unconstrained
//#define DELTA_HOME_TO_SAFE_ZONE
// Delta calibration menu
// Add three-point calibration to the MarlinUI menu.
// See http://minow.blogspot.com/index.html#4918805519571907051
//#define DELTA_CALIBRATION_MENU
// G33 Delta Auto-Calibration. Enable EEPROM_SETTINGS to store results.
//#define DELTA_AUTO_CALIBRATION
#if ENABLED(DELTA_AUTO_CALIBRATION)
// Default number of probe points : n*n (1 -> 7)
#define DELTA_CALIBRATION_DEFAULT_POINTS 4
#endif
#if ANY(DELTA_AUTO_CALIBRATION, DELTA_CALIBRATION_MENU)
// Step size for paper-test probing
#define PROBE_MANUALLY_STEP 0.05 // (mm)
#endif
// Print surface diameter/2 minus unreachable space (avoid collisions with vertical towers).
#define PRINTABLE_RADIUS 140.0 // (mm)
// Maximum reachable area
#define DELTA_MAX_RADIUS 140.0 // (mm)
// Center-to-center distance of the holes in the diagonal push rods.
#define DELTA_DIAGONAL_ROD 250.0 // (mm)
// Distance between bed and nozzle Z home position
#define DELTA_HEIGHT 250.00 // (mm) Get this value from G33 auto calibrate
#define DELTA_ENDSTOP_ADJ { 0.0, 0.0, 0.0 } // Get these values from G33 auto calibrate
// Horizontal distance bridged by diagonal push rods when effector is centered.
#define DELTA_RADIUS 124.0 // (mm) Get this value from G33 auto calibrate
// Trim adjustments for individual towers
// tower angle corrections for X and Y tower / rotate XYZ so Z tower angle = 0
// measured in degrees anticlockwise looking from above the printer
#define DELTA_TOWER_ANGLE_TRIM { 0.0, 0.0, 0.0 } // Get these values from G33 auto calibrate
// Delta radius and diagonal rod adjustments (mm)
//#define DELTA_RADIUS_TRIM_TOWER { 0.0, 0.0, 0.0 }
//#define DELTA_DIAGONAL_ROD_TRIM_TOWER { 0.0, 0.0, 0.0 }
#endif
// @section scara
/**
* MORGAN_SCARA was developed by QHARLEY in South Africa in 2012-2013.
* Implemented and slightly reworked by JCERNY in June, 2014.
*
* Mostly Printed SCARA is an open source design by Tyler Williams. See:
* https://www.thingiverse.com/thing:2487048
* https://www.thingiverse.com/thing:1241491
*/
//#define MORGAN_SCARA
//#define MP_SCARA
#if ANY(MORGAN_SCARA, MP_SCARA)
// If movement is choppy try lowering this value
#define DEFAULT_SEGMENTS_PER_SECOND 200
// Length of inner and outer support arms. Measure arm lengths precisely.
#define SCARA_LINKAGE_1 150 // (mm)
#define SCARA_LINKAGE_2 150 // (mm)
// SCARA tower offset (position of Tower relative to bed zero position)
// This needs to be reasonably accurate as it defines the printbed position in the SCARA space.
#define SCARA_OFFSET_X 100 // (mm)
#define SCARA_OFFSET_Y -56 // (mm)
#if ENABLED(MORGAN_SCARA)
//#define DEBUG_SCARA_KINEMATICS
#define FEEDRATE_SCALING // Convert XY feedrate from mm/s to degrees/s on the fly
// Radius around the center where the arm cannot reach
#define MIDDLE_DEAD_ZONE_R 0 // (mm)
#define THETA_HOMING_OFFSET 0 // Calculated from Calibration Guide and M360 / M114. See http://reprap.harleystudio.co.za/?page_id=1073
#define PSI_HOMING_OFFSET 0 // Calculated from Calibration Guide and M364 / M114. See http://reprap.harleystudio.co.za/?page_id=1073
#elif ENABLED(MP_SCARA)
#define SCARA_OFFSET_THETA1 12 // degrees
#define SCARA_OFFSET_THETA2 131 // degrees
#endif
#endif
// @section tpara
// Enable for TPARA kinematics and configure below
//#define AXEL_TPARA
#if ENABLED(AXEL_TPARA)
#define DEBUG_TPARA_KINEMATICS
#define DEFAULT_SEGMENTS_PER_SECOND 200
// Length of inner and outer support arms. Measure arm lengths precisely.
#define TPARA_LINKAGE_1 120 // (mm)
#define TPARA_LINKAGE_2 120 // (mm)
// SCARA tower offset (position of Tower relative to bed zero position)
// This needs to be reasonably accurate as it defines the printbed position in the SCARA space.
#define TPARA_OFFSET_X 0 // (mm)
#define TPARA_OFFSET_Y 0 // (mm)
#define TPARA_OFFSET_Z 0 // (mm)
#define FEEDRATE_SCALING // Convert XY feedrate from mm/s to degrees/s on the fly
// Radius around the center where the arm cannot reach
#define MIDDLE_DEAD_ZONE_R 0 // (mm)
// Calculated from Calibration Guide and M360 / M114. See http://reprap.harleystudio.co.za/?page_id=1073
#define THETA_HOMING_OFFSET 0
#define PSI_HOMING_OFFSET 0
#endif
// @section polar
/**
* POLAR Kinematics
* developed by Kadir ilkimen for PolarBear CNC and babyBear
* https://github.com/kadirilkimen/Polar-Bear-Cnc-Machine
* https://github.com/kadirilkimen/babyBear-3D-printer
*
* A polar machine can have different configurations.
* This kinematics is only compatible with the following configuration:
* X : Independent linear
* Y or B : Polar
* Z : Independent linear
*
* For example, PolarBear has CoreXZ plus Polar Y or B.
*
* Motion problem for Polar axis near center / origin:
*
* 3D printing:
* Movements very close to the center of the polar axis take more time than others.
* This brief delay results in more material deposition due to the pressure in the nozzle.
*
* Current Kinematics and feedrate scaling deals with this by making the movement as fast
* as possible. It works for slow movements but doesn't work well with fast ones. A more
* complicated extrusion compensation must be implemented.
*
* Ideally, it should estimate that a long rotation near the center is ahead and will cause
* unwanted deposition. Therefore it can compensate the extrusion beforehand.
*
* Laser cutting:
* Same thing would be a problem for laser engraving too. As it spends time rotating at the
* center point, more likely it will burn more material than it should. Therefore similar
* compensation would be implemented for laser-cutting operations.
*
* Milling:
* This shouldn't be a problem for cutting/milling operations.
*/
//#define POLAR
#if ENABLED(POLAR)
#define DEFAULT_SEGMENTS_PER_SECOND 180 // If movement is choppy try lowering this value
#define PRINTABLE_RADIUS 82.0f // (mm) Maximum travel of X axis
// Movements fall inside POLAR_FAST_RADIUS are assigned the highest possible feedrate
// to compensate unwanted deposition related to the near-origin motion problem.
#define POLAR_FAST_RADIUS 3.0f // (mm)
// Radius which is unreachable by the tool.
// Needed if the tool is not perfectly aligned to the center of the polar axis.
#define POLAR_CENTER_OFFSET 0.0f // (mm)
#define FEEDRATE_SCALING // Convert XY feedrate from mm/s to degrees/s on the fly
#endif
// @section machine
// Articulated robot (arm). Joints are directly mapped to axes with no kinematics.
//#define ARTICULATED_ROBOT_ARM
// For a hot wire cutter with parallel horizontal axes (X, I) where the heights of the two wire
// ends are controlled by parallel axes (Y, J). Joints are directly mapped to axes (no kinematics).
//#define FOAMCUTTER_XYUV
//===========================================================================
//============================== Endstop Settings ===========================
//===========================================================================
// @section endstops
// Enable pullup for all endstops to prevent a floating state
#define ENDSTOPPULLUPS
#if DISABLED(ENDSTOPPULLUPS)
// Disable ENDSTOPPULLUPS to set pullups individually
//#define ENDSTOPPULLUP_XMIN
//#define ENDSTOPPULLUP_YMIN
//#define ENDSTOPPULLUP_ZMIN
//#define ENDSTOPPULLUP_IMIN
//#define ENDSTOPPULLUP_JMIN
//#define ENDSTOPPULLUP_KMIN
//#define ENDSTOPPULLUP_UMIN
//#define ENDSTOPPULLUP_VMIN
//#define ENDSTOPPULLUP_WMIN
//#define ENDSTOPPULLUP_XMAX
//#define ENDSTOPPULLUP_YMAX
//#define ENDSTOPPULLUP_ZMAX
//#define ENDSTOPPULLUP_IMAX
//#define ENDSTOPPULLUP_JMAX
//#define ENDSTOPPULLUP_KMAX
//#define ENDSTOPPULLUP_UMAX
//#define ENDSTOPPULLUP_VMAX
//#define ENDSTOPPULLUP_WMAX
//#define ENDSTOPPULLUP_ZMIN_PROBE
#endif
// Enable pulldown for all endstops to prevent a floating state
//#define ENDSTOPPULLDOWNS
#if DISABLED(ENDSTOPPULLDOWNS)
// Disable ENDSTOPPULLDOWNS to set pulldowns individually
//#define ENDSTOPPULLDOWN_XMIN
//#define ENDSTOPPULLDOWN_YMIN
//#define ENDSTOPPULLDOWN_ZMIN
//#define ENDSTOPPULLDOWN_IMIN
//#define ENDSTOPPULLDOWN_JMIN
//#define ENDSTOPPULLDOWN_KMIN
//#define ENDSTOPPULLDOWN_UMIN
//#define ENDSTOPPULLDOWN_VMIN
//#define ENDSTOPPULLDOWN_WMIN
//#define ENDSTOPPULLDOWN_XMAX
//#define ENDSTOPPULLDOWN_YMAX
//#define ENDSTOPPULLDOWN_ZMAX
//#define ENDSTOPPULLDOWN_IMAX
//#define ENDSTOPPULLDOWN_JMAX
//#define ENDSTOPPULLDOWN_KMAX
//#define ENDSTOPPULLDOWN_UMAX
//#define ENDSTOPPULLDOWN_VMAX
//#define ENDSTOPPULLDOWN_WMAX
//#define ENDSTOPPULLDOWN_ZMIN_PROBE
#endif
/**
* Endstop "Hit" State
* Set to the state (HIGH or LOW) that applies to each endstop.
*/
#define X_MIN_ENDSTOP_HIT_STATE LOW
#define X_MAX_ENDSTOP_HIT_STATE HIGH
#define Y_MIN_ENDSTOP_HIT_STATE LOW
#define Y_MAX_ENDSTOP_HIT_STATE HIGH
#define Z_MIN_ENDSTOP_HIT_STATE HIGH
#define Z_MAX_ENDSTOP_HIT_STATE HIGH
#define I_MIN_ENDSTOP_HIT_STATE HIGH
#define I_MAX_ENDSTOP_HIT_STATE HIGH
#define J_MIN_ENDSTOP_HIT_STATE HIGH
#define J_MAX_ENDSTOP_HIT_STATE HIGH
#define K_MIN_ENDSTOP_HIT_STATE HIGH
#define K_MAX_ENDSTOP_HIT_STATE HIGH
#define U_MIN_ENDSTOP_HIT_STATE HIGH
#define U_MAX_ENDSTOP_HIT_STATE HIGH
#define V_MIN_ENDSTOP_HIT_STATE HIGH
#define V_MAX_ENDSTOP_HIT_STATE HIGH
#define W_MIN_ENDSTOP_HIT_STATE HIGH
#define W_MAX_ENDSTOP_HIT_STATE HIGH
#define Z_MIN_PROBE_ENDSTOP_HIT_STATE HIGH
// Enable this feature if all enabled endstop pins are interrupt-capable.
// This will remove the need to poll the interrupt pins, saving many CPU cycles.
//#define ENDSTOP_INTERRUPTS_FEATURE
/**
* Endstop Noise Threshold
*
* Enable if your probe or endstops falsely trigger due to noise.
*
* - Higher values may affect repeatability or accuracy of some bed probes.
* - To fix noise install a 100nF ceramic capacitor in parallel with the switch.
* - This feature is not required for common micro-switches mounted on PCBs
* based on the Makerbot design, which already have the 100nF capacitor.
*
* :[2,3,4,5,6,7]
*/
//#define ENDSTOP_NOISE_THRESHOLD 2
// Check for stuck or disconnected endstops during homing moves.
//#define DETECT_BROKEN_ENDSTOP
//=============================================================================
//============================== Movement Settings ============================
//=============================================================================
// @section motion
/**
* Default Settings
*
* These settings can be reset by M502
*
* Note that if EEPROM is enabled, saved values will override these.
*/
/**
* With this option each E stepper can have its own factors for the
* following movement settings. If fewer factors are given than the
* total number of extruders, the last value applies to the rest.
*/
//#define DISTINCT_E_FACTORS
/**
* Default Axis Steps Per Unit (linear=steps/mm, rotational=steps/°)
* Override with M92
* X, Y, Z [, I [, J [, K...]]], E0 [, E1[, E2...]]
*/
#define DEFAULT_AXIS_STEPS_PER_UNIT { 79.77, 79.67, 405.6, 423.99 }
/**
* Default Max Feed Rate (linear=mm/s, rotational=°/s)
* Override with M203
* X, Y, Z [, I [, J [, K...]]], E0 [, E1[, E2...]]
*/
#define DEFAULT_MAX_FEEDRATE { 500, 500, 30, 100 }
//#define LIMITED_MAX_FR_EDITING // Limit edit via M203 or LCD to DEFAULT_MAX_FEEDRATE * 2
#if ENABLED(LIMITED_MAX_FR_EDITING)
#define MAX_FEEDRATE_EDIT_VALUES { 600, 600, 10, 50 } // ...or, set your own edit limits
#endif
/**
* Default Max Acceleration (speed change with time) (linear=mm/(s^2), rotational=°/(s^2))
* (Maximum start speed for accelerated moves)
* Override with M201
* X, Y, Z [, I [, J [, K...]]], E0 [, E1[, E2...]]
*/
#define DEFAULT_MAX_ACCELERATION { 2000, 2000, 120, 10000 }
//#define LIMITED_MAX_ACCEL_EDITING // Limit edit via M201 or LCD to DEFAULT_MAX_ACCELERATION * 2
#if ENABLED(LIMITED_MAX_ACCEL_EDITING)
#define MAX_ACCEL_EDIT_VALUES { 6000, 6000, 200, 20000 } // ...or, set your own edit limits
#endif
/**
* Default Acceleration (speed change with time) (linear=mm/(s^2), rotational=°/(s^2))
* Override with M204
*
* M204 P Acceleration
* M204 R Retract Acceleration
* M204 T Travel Acceleration
*/
#define DEFAULT_ACCELERATION 1000 // X, Y, Z and E acceleration for printing moves
#define DEFAULT_RETRACT_ACCELERATION 10000 // E acceleration for retracts
#define DEFAULT_TRAVEL_ACCELERATION 1500 // X, Y, Z acceleration for travel (non printing) moves
/**
* Default Jerk limits (mm/s)
* Override with M205 X Y Z . . . E
*
* "Jerk" specifies the minimum speed change that requires acceleration.
* When changing speed and direction, if the difference is less than the
* value set here, it may happen instantaneously.
*/
//#define CLASSIC_JERK
#if ENABLED(CLASSIC_JERK)
#define DEFAULT_XJERK 10.0
#define DEFAULT_YJERK 10.0
#define DEFAULT_ZJERK 0.3
//#define DEFAULT_IJERK 0.3
//#define DEFAULT_JJERK 0.3
//#define DEFAULT_KJERK 0.3
//#define DEFAULT_UJERK 0.3
//#define DEFAULT_VJERK 0.3
//#define DEFAULT_WJERK 0.3
//#define TRAVEL_EXTRA_XYJERK 0.0 // Additional jerk allowance for all travel moves
//#define LIMITED_JERK_EDITING // Limit edit via M205 or LCD to DEFAULT_aJERK * 2
#if ENABLED(LIMITED_JERK_EDITING)
#define MAX_JERK_EDIT_VALUES { 20, 20, 0.6, 10 } // ...or, set your own edit limits
#endif
#endif
#define DEFAULT_EJERK 5.0 // May be used by Linear Advance
/**
* Junction Deviation Factor
*
* See:
* https://reprap.org/forum/read.php?1,739819
* https://blog.kyneticcnc.com/2018/10/computing-junction-deviation-for-marlin.html
*/
#if DISABLED(CLASSIC_JERK)
#define JUNCTION_DEVIATION_MM 0.013 // (mm) Distance from real junction edge
#define JD_HANDLE_SMALL_SEGMENTS // Use curvature estimation instead of just the junction angle
// for small segments (< 1mm) with large junction angles (> 135°).
#endif
/**
* S-Curve Acceleration
*
* This option eliminates vibration during printing by fitting a Bézier
* curve to move acceleration, producing much smoother direction changes.
*
* See https://github.com/synthetos/TinyG/wiki/Jerk-Controlled-Motion-Explained
*/
#define S_CURVE_ACCELERATION
//===========================================================================
//============================= Z Probe Options =============================
//===========================================================================
// @section probes
//
// See https://marlinfw.org/docs/configuration/probes.html
//
/**
* Enable this option for a probe connected to the Z-MIN pin.
* The probe replaces the Z-MIN endstop and is used for Z homing.
* (Automatically enables USE_PROBE_FOR_Z_HOMING.)
*/
#define Z_MIN_PROBE_USES_Z_MIN_ENDSTOP_PIN
// Force the use of the probe for Z-axis homing
#define USE_PROBE_FOR_Z_HOMING
/**
* Z_MIN_PROBE_PIN
*
* Override this pin only if the probe cannot be connected to
* the default Z_MIN_PROBE_PIN for the selected MOTHERBOARD.
*
* - The simplest option is to use a free endstop connector.
* - Use 5V for powered (usually inductive) sensors.
*
* - For simple switches...
* - Normally-closed (NC) also connect to GND.
* - Normally-open (NO) also connect to 5V.
*/
//#define Z_MIN_PROBE_PIN -1
/**
* Probe Type
*
* Allen Key Probes, Servo Probes, Z-Sled Probes, FIX_MOUNTED_PROBE, etc.
* Activate one of these to use Auto Bed Leveling below.
*/
/**
* The "Manual Probe" provides a means to do "Auto" Bed Leveling without a probe.
* Use G29 repeatedly, adjusting the Z height at each point with movement commands
* or (with LCD_BED_LEVELING) the LCD controller.
*/
//#define PROBE_MANUALLY
/**
* A Fix-Mounted Probe either doesn't deploy or needs manual deployment.
* (e.g., an inductive probe or a nozzle-based probe-switch.)
*/
//#define FIX_MOUNTED_PROBE
/**
* Use the nozzle as the probe, as with a conductive
* nozzle system or a piezo-electric smart effector.
*/
//#define NOZZLE_AS_PROBE
/**
* Z Servo Probe, such as an endstop switch on a rotating arm.
*/
//#define Z_PROBE_SERVO_NR 0
#ifdef Z_PROBE_SERVO_NR
//#define Z_SERVO_ANGLES { 70, 0 } // Z Servo Deploy and Stow angles
//#define Z_SERVO_MEASURE_ANGLE 45 // Use if the servo must move to a "free" position for measuring after deploy
//#define Z_SERVO_INTERMEDIATE_STOW // Stow the probe between points
//#define Z_SERVO_DEACTIVATE_AFTER_STOW // Deactivate the servo when probe is stowed
#endif
/**
* The BLTouch probe uses a Hall effect sensor and emulates a servo.
*/
#define BLTOUCH
/**
* MagLev V4 probe by MDD
*
* This probe is deployed and activated by powering a built-in electromagnet.
*/
//#define MAGLEV4
#if ENABLED(MAGLEV4)
//#define MAGLEV_TRIGGER_PIN 11 // Set to the connected digital output
#define MAGLEV_TRIGGER_DELAY 15 // Changing this risks overheating the coil
#endif
/**
* Touch-MI Probe by hotends.fr
*
* This probe is deployed and activated by moving the X-axis to a magnet at the edge of the bed.
* By default, the magnet is assumed to be on the left and activated by a home. If the magnet is
* on the right, enable and set TOUCH_MI_DEPLOY_XPOS to the deploy position.
*
* Also requires: BABYSTEPPING, BABYSTEP_ZPROBE_OFFSET, Z_SAFE_HOMING,
* and a minimum Z_CLEARANCE_FOR_HOMING of 10.
*/
//#define TOUCH_MI_PROBE
#if ENABLED(TOUCH_MI_PROBE)
#define TOUCH_MI_RETRACT_Z 0.5 // Height at which the probe retracts
//#define TOUCH_MI_DEPLOY_XPOS (X_MAX_BED + 2) // For a magnet on the right side of the bed
//#define TOUCH_MI_MANUAL_DEPLOY // For manual deploy (LCD menu)
#endif
// A probe that is deployed and stowed with a solenoid pin (SOL1_PIN)
//#define SOLENOID_PROBE
// A sled-mounted probe like those designed by Charles Bell.
//#define Z_PROBE_SLED
//#define SLED_DOCKING_OFFSET 5 // The extra distance the X axis must travel to pickup the sled. 0 should be fine but you can push it further if you'd like.
// A probe deployed by moving the x-axis, such as the Wilson II's rack-and-pinion probe designed by Marty Rice.
//#define RACK_AND_PINION_PROBE
#if ENABLED(RACK_AND_PINION_PROBE)
#define Z_PROBE_DEPLOY_X X_MIN_POS
#define Z_PROBE_RETRACT_X X_MAX_POS
#endif
/**
* Magnetically Mounted Probe
* For probes such as Euclid, Klicky, Klackender, etc.
*/
//#define MAG_MOUNTED_PROBE
#if ENABLED(MAG_MOUNTED_PROBE)
#define PROBE_DEPLOY_FEEDRATE (133*60) // (mm/min) Probe deploy speed
#define PROBE_STOW_FEEDRATE (133*60) // (mm/min) Probe stow speed
#define MAG_MOUNTED_DEPLOY_1 { PROBE_DEPLOY_FEEDRATE, { 245, 114, 30 } } // Move to side Dock & Attach probe
#define MAG_MOUNTED_DEPLOY_2 { PROBE_DEPLOY_FEEDRATE, { 210, 114, 30 } } // Move probe off dock
#define MAG_MOUNTED_DEPLOY_3 { PROBE_DEPLOY_FEEDRATE, { 0, 0, 0 } } // Extra move if needed
#define MAG_MOUNTED_DEPLOY_4 { PROBE_DEPLOY_FEEDRATE, { 0, 0, 0 } } // Extra move if needed
#define MAG_MOUNTED_DEPLOY_5 { PROBE_DEPLOY_FEEDRATE, { 0, 0, 0 } } // Extra move if needed
#define MAG_MOUNTED_STOW_1 { PROBE_STOW_FEEDRATE, { 245, 114, 20 } } // Move to dock
#define MAG_MOUNTED_STOW_2 { PROBE_STOW_FEEDRATE, { 245, 114, 0 } } // Place probe beside remover
#define MAG_MOUNTED_STOW_3 { PROBE_STOW_FEEDRATE, { 230, 114, 0 } } // Side move to remove probe
#define MAG_MOUNTED_STOW_4 { PROBE_STOW_FEEDRATE, { 210, 114, 20 } } // Side move to remove probe
#define MAG_MOUNTED_STOW_5 { PROBE_STOW_FEEDRATE, { 0, 0, 0 } } // Extra move if needed
#endif
// Duet Smart Effector (for delta printers) - https://bit.ly/2ul5U7J
// When the pin is defined you can use M672 to set/reset the probe sensitivity.
//#define DUET_SMART_EFFECTOR
#if ENABLED(DUET_SMART_EFFECTOR)
#define SMART_EFFECTOR_MOD_PIN -1 // Connect a GPIO pin to the Smart Effector MOD pin
#endif
/**
* Use StallGuard2 to probe the bed with the nozzle.
* Requires stallGuard-capable Trinamic stepper drivers.
* CAUTION: This can damage machines with Z lead screws.
* Take extreme care when setting up this feature.
*/
//#define SENSORLESS_PROBING
/**
* Allen key retractable z-probe as seen on many Kossel delta printers - https://reprap.org/wiki/Kossel#Automatic_bed_leveling_probe
* Deploys by touching z-axis belt. Retracts by pushing the probe down.
*/
//#define Z_PROBE_ALLEN_KEY
#if ENABLED(Z_PROBE_ALLEN_KEY)
// 2 or 3 sets of coordinates for deploying and retracting the spring loaded touch probe on G29,
// if servo actuated touch probe is not defined. Uncomment as appropriate for your printer/probe.
#define Z_PROBE_ALLEN_KEY_DEPLOY_1 { 30.0, PRINTABLE_RADIUS, 100.0 }
#define Z_PROBE_ALLEN_KEY_DEPLOY_1_FEEDRATE XY_PROBE_FEEDRATE
#define Z_PROBE_ALLEN_KEY_DEPLOY_2 { 0.0, PRINTABLE_RADIUS, 100.0 }
#define Z_PROBE_ALLEN_KEY_DEPLOY_2_FEEDRATE (XY_PROBE_FEEDRATE)/10
#define Z_PROBE_ALLEN_KEY_DEPLOY_3 { 0.0, (PRINTABLE_RADIUS) * 0.75, 100.0 }
#define Z_PROBE_ALLEN_KEY_DEPLOY_3_FEEDRATE XY_PROBE_FEEDRATE
#define Z_PROBE_ALLEN_KEY_STOW_1 { -64.0, 56.0, 23.0 } // Move the probe into position
#define Z_PROBE_ALLEN_KEY_STOW_1_FEEDRATE XY_PROBE_FEEDRATE
#define Z_PROBE_ALLEN_KEY_STOW_2 { -64.0, 56.0, 3.0 } // Push it down
#define Z_PROBE_ALLEN_KEY_STOW_2_FEEDRATE (XY_PROBE_FEEDRATE)/10
#define Z_PROBE_ALLEN_KEY_STOW_3 { -64.0, 56.0, 50.0 } // Move it up to clear
#define Z_PROBE_ALLEN_KEY_STOW_3_FEEDRATE XY_PROBE_FEEDRATE
#define Z_PROBE_ALLEN_KEY_STOW_4 { 0.0, 0.0, 50.0 }
#define Z_PROBE_ALLEN_KEY_STOW_4_FEEDRATE XY_PROBE_FEEDRATE
#endif // Z_PROBE_ALLEN_KEY
/**
* Nozzle-to-Probe offsets { X, Y, Z }
*
* X and Y offset
* Use a caliper or ruler to measure the distance from the tip of
* the Nozzle to the center-point of the Probe in the X and Y axes.
*
* Z offset
* - For the Z offset use your best known value and adjust at runtime.
* - Common probes trigger below the nozzle and have negative values for Z offset.
* - Probes triggering above the nozzle height are uncommon but do exist. When using
* probes such as this, carefully set Z_CLEARANCE_DEPLOY_PROBE and Z_CLEARANCE_BETWEEN_PROBES
* to avoid collisions during probing.
*
* Tune and Adjust
* - Probe Offsets can be tuned at runtime with 'M851', LCD menus, babystepping, etc.
* - PROBE_OFFSET_WIZARD (configuration_adv.h) can be used for setting the Z offset.
*
* Assuming the typical work area orientation:
* - Probe to RIGHT of the Nozzle has a Positive X offset
* - Probe to LEFT of the Nozzle has a Negative X offset
* - Probe in BACK of the Nozzle has a Positive Y offset
* - Probe in FRONT of the Nozzle has a Negative Y offset
*
* Some examples:
* #define NOZZLE_TO_PROBE_OFFSET { 10, 10, -1 } // Example "1"
* #define NOZZLE_TO_PROBE_OFFSET {-10, 5, -1 } // Example "2"
* #define NOZZLE_TO_PROBE_OFFSET { 5, -5, -1 } // Example "3"
* #define NOZZLE_TO_PROBE_OFFSET {-15,-10, -1 } // Example "4"
*
* +-- BACK ---+
* | [+] |
* L | 1 | R <-- Example "1" (right+, back+)
* E | 2 | I <-- Example "2" ( left-, back+)
* F |[-] N [+]| G <-- Nozzle
* T | 3 | H <-- Example "3" (right+, front-)
* | 4 | T <-- Example "4" ( left-, front-)
* | [-] |
* O-- FRONT --+
*/
#define NOZZLE_TO_PROBE_OFFSET { 45, 12, -0.8 }
// Enable and set to use a specific tool for probing. Disable to allow any tool.
#define PROBING_TOOL 0
#ifdef PROBING_TOOL
//#define PROBE_TOOLCHANGE_NO_MOVE // Suppress motion on probe tool-change
#endif
// Most probes should stay away from the edges of the bed, but
// with NOZZLE_AS_PROBE this can be negative for a wider probing area.
#define PROBING_MARGIN 10
// X and Y axis travel speed (mm/min) between probes
#define XY_PROBE_FEEDRATE (133*60)
// Feedrate (mm/min) for the first approach when double-probing (MULTIPLE_PROBING == 2)
#define Z_PROBE_FEEDRATE_FAST (4*60)
// Feedrate (mm/min) for the "accurate" probe of each point
#define Z_PROBE_FEEDRATE_SLOW (Z_PROBE_FEEDRATE_FAST / 2)
/**
* Probe Activation Switch
* A switch indicating proper deployment, or an optical
* switch triggered when the carriage is near the bed.
*/
//#define PROBE_ACTIVATION_SWITCH
#if ENABLED(PROBE_ACTIVATION_SWITCH)
#define PROBE_ACTIVATION_SWITCH_STATE LOW // State indicating probe is active
//#define PROBE_ACTIVATION_SWITCH_PIN PC6 // Override default pin
#endif
/**
* Tare Probe (determine zero-point) prior to each probe.
* Useful for a strain gauge or piezo sensor that needs to factor out
* elements such as cables pulling on the carriage.
*/
//#define PROBE_TARE
#if ENABLED(PROBE_TARE)
#define PROBE_TARE_TIME 200 // (ms) Time to hold tare pin
#define PROBE_TARE_DELAY 200 // (ms) Delay after tare before
#define PROBE_TARE_STATE HIGH // State to write pin for tare
//#define PROBE_TARE_PIN PA5 // Override default pin
#if ENABLED(PROBE_ACTIVATION_SWITCH)
//#define PROBE_TARE_ONLY_WHILE_INACTIVE // Fail to tare/probe if PROBE_ACTIVATION_SWITCH is active
#endif
#endif
/**
* Probe Enable / Disable
* The probe only provides a triggered signal when enabled.
*/
//#define PROBE_ENABLE_DISABLE
#if ENABLED(PROBE_ENABLE_DISABLE)
//#define PROBE_ENABLE_PIN -1 // Override the default pin here
#endif
/**
* Multiple Probing
*
* You may get improved results by probing 2 or more times.
* With EXTRA_PROBING the more atypical reading(s) will be disregarded.
*
* A total of 2 does fast/slow probes with a weighted average.
* A total of 3 or more adds more slow probes, taking the average.
*/
//#define MULTIPLE_PROBING 2
//#define EXTRA_PROBING 1
/**
* Z probes require clearance when deploying, stowing, and moving between
* probe points to avoid hitting the bed and other hardware.
* Servo-mounted probes require extra space for the arm to rotate.
* Inductive probes need space to keep from triggering early.
*
* Use these settings to specify the distance (mm) to raise the probe (or
* lower the bed). The values set here apply over and above any (negative)
* probe Z Offset set with NOZZLE_TO_PROBE_OFFSET, M851, or the LCD.
* Only integer values >= 1 are valid here.
*
* Example: `M851 Z-5` with a CLEARANCE of 4 => 9mm from bed to nozzle.
* But: `M851 Z+1` with a CLEARANCE of 2 => 2mm from bed to nozzle.
*/
#define Z_CLEARANCE_DEPLOY_PROBE 10 // Z Clearance for Deploy/Stow
#define Z_CLEARANCE_BETWEEN_PROBES 5 // Z Clearance between probe points
#define Z_CLEARANCE_MULTI_PROBE 5 // Z Clearance between multiple probes
//#define Z_AFTER_PROBING 5 // Z position after probing is done
#define Z_PROBE_LOW_POINT -2 // Farthest distance below the trigger-point to go before stopping
// For M851 give a range for adjusting the Z probe offset
#define Z_PROBE_OFFSET_RANGE_MIN -20
#define Z_PROBE_OFFSET_RANGE_MAX 20
// Enable the M48 repeatability test to test probe accuracy
#define Z_MIN_PROBE_REPEATABILITY_TEST
// Before deploy/stow pause for user confirmation
//#define PAUSE_BEFORE_DEPLOY_STOW
#if ENABLED(PAUSE_BEFORE_DEPLOY_STOW)
//#define PAUSE_PROBE_DEPLOY_WHEN_TRIGGERED // For Manual Deploy Allenkey Probe
#endif
/**
* Enable one or more of the following if probing seems unreliable.
* Heaters and/or fans can be disabled during probing to minimize electrical
* noise. A delay can also be added to allow noise and vibration to settle.
* These options are most useful for the BLTouch probe, but may also improve
* readings with inductive probes and piezo sensors.
*/
//#define PROBING_HEATERS_OFF // Turn heaters off when probing
#if ENABLED(PROBING_HEATERS_OFF)
//#define WAIT_FOR_BED_HEATER // Wait for bed to heat back up between probes (to improve accuracy)
//#define WAIT_FOR_HOTEND // Wait for hotend to heat back up between probes (to improve accuracy & prevent cold extrude)
#endif
//#define PROBING_FANS_OFF // Turn fans off when probing
//#define PROBING_ESTEPPERS_OFF // Turn all extruder steppers off when probing
//#define PROBING_STEPPERS_OFF // Turn all steppers off (unless needed to hold position) when probing (including extruders)
//#define DELAY_BEFORE_PROBING 200 // (ms) To prevent vibrations from triggering piezo sensors
// Require minimum nozzle and/or bed temperature for probing
#define PREHEAT_BEFORE_PROBING
#if ENABLED(PREHEAT_BEFORE_PROBING)
#define PROBING_NOZZLE_TEMP 120 // (°C) Only applies to E0 at this time
#define PROBING_BED_TEMP 50
#endif
// For Inverting Stepper Enable Pins (Active Low) use 0, Non Inverting (Active High) use 1
// :{ 0:'Low', 1:'High' }
#define X_ENABLE_ON 0
#define Y_ENABLE_ON 0
#define Z_ENABLE_ON 0
#define E_ENABLE_ON 0 // For all extruders
//#define I_ENABLE_ON 0
//#define J_ENABLE_ON 0
//#define K_ENABLE_ON 0
//#define U_ENABLE_ON 0
//#define V_ENABLE_ON 0
//#define W_ENABLE_ON 0
// Disable axis steppers immediately when they're not being stepped.
// WARNING: When motors turn off there is a chance of losing position accuracy!
//#define DISABLE_X
//#define DISABLE_Y
//#define DISABLE_Z
//#define DISABLE_I
//#define DISABLE_J
//#define DISABLE_K
//#define DISABLE_U
//#define DISABLE_V
//#define DISABLE_W
// Turn off the display blinking that warns about possible accuracy reduction
//#define DISABLE_REDUCED_ACCURACY_WARNING
// @section extruder
//#define DISABLE_E // Disable the extruder when not stepping
#define DISABLE_OTHER_EXTRUDERS // Keep only the active extruder enabled
// @section motion
// Invert the stepper direction. Change (or reverse the motor connector) if an axis goes the wrong way.
#define INVERT_X_DIR true
#define INVERT_Y_DIR true
#define INVERT_Z_DIR false
//#define INVERT_I_DIR false
//#define INVERT_J_DIR false
//#define INVERT_K_DIR false
//#define INVERT_U_DIR false
//#define INVERT_V_DIR false
//#define INVERT_W_DIR false
// @section extruder
// For direct drive extruder v9 set to true, for geared extruder set to false.
#define INVERT_E0_DIR true
#define INVERT_E1_DIR false
#define INVERT_E2_DIR false
#define INVERT_E3_DIR false
#define INVERT_E4_DIR false
#define INVERT_E5_DIR false
#define INVERT_E6_DIR false
#define INVERT_E7_DIR false
// @section homing
//#define NO_MOTION_BEFORE_HOMING // Inhibit movement until all axes have been homed. Also enable HOME_AFTER_DEACTIVATE for extra safety.
//#define HOME_AFTER_DEACTIVATE // Require rehoming after steppers are deactivated. Also enable NO_MOTION_BEFORE_HOMING for extra safety.
/**
* Set Z_IDLE_HEIGHT if the Z-Axis moves on its own when steppers are disabled.
* - Use a low value (i.e., Z_MIN_POS) if the nozzle falls down to the bed.
* - Use a large value (i.e., Z_MAX_POS) if the bed falls down, away from the nozzle.
*/
//#define Z_IDLE_HEIGHT Z_HOME_POS
//#define Z_CLEARANCE_FOR_HOMING 4 // (mm) Minimal Z height before homing (G28) for Z clearance above the bed, clamps, ...
// Be sure to have this much clearance over your Z_MAX_POS to prevent grinding.
//#define Z_AFTER_HOMING 10 // (mm) Height to move to after homing (if Z was homed)
// Direction of endstops when homing; 1=MAX, -1=MIN
// :[-1,1]
#define X_HOME_DIR -1
#define Y_HOME_DIR -1
#define Z_HOME_DIR -1
//#define I_HOME_DIR -1
//#define J_HOME_DIR -1
//#define K_HOME_DIR -1
//#define U_HOME_DIR -1
//#define V_HOME_DIR -1
//#define W_HOME_DIR -1
// @section geometry
// The size of the printable area
#define X_BED_SIZE 300
#define Y_BED_SIZE 300
// Travel limits (linear=mm, rotational=°) after homing, corresponding to endstop positions.
#define X_MIN_POS 0
#define Y_MIN_POS 0
#define Z_MIN_POS 0
#define X_MAX_POS X_BED_SIZE
#define Y_MAX_POS 300
#define Z_MAX_POS 400
//#define I_MIN_POS 0
//#define I_MAX_POS 50
//#define J_MIN_POS 0
//#define J_MAX_POS 50
//#define K_MIN_POS 0
//#define K_MAX_POS 50
//#define U_MIN_POS 0
//#define U_MAX_POS 50
//#define V_MIN_POS 0
//#define V_MAX_POS 50
//#define W_MIN_POS 0
//#define W_MAX_POS 50
/**
* Software Endstops
*
* - Prevent moves outside the set machine bounds.
* - Individual axes can be disabled, if desired.
* - X and Y only apply to Cartesian robots.
* - Use 'M211' to set software endstops on/off or report current state
*/
// Min software endstops constrain movement within minimum coordinate bounds
#define MIN_SOFTWARE_ENDSTOPS
#if ENABLED(MIN_SOFTWARE_ENDSTOPS)
#define MIN_SOFTWARE_ENDSTOP_X
#define MIN_SOFTWARE_ENDSTOP_Y
#define MIN_SOFTWARE_ENDSTOP_Z
#define MIN_SOFTWARE_ENDSTOP_I
#define MIN_SOFTWARE_ENDSTOP_J
#define MIN_SOFTWARE_ENDSTOP_K
#define MIN_SOFTWARE_ENDSTOP_U
#define MIN_SOFTWARE_ENDSTOP_V
#define MIN_SOFTWARE_ENDSTOP_W
#endif
// Max software endstops constrain movement within maximum coordinate bounds
#define MAX_SOFTWARE_ENDSTOPS
#if ENABLED(MAX_SOFTWARE_ENDSTOPS)
#define MAX_SOFTWARE_ENDSTOP_X
#define MAX_SOFTWARE_ENDSTOP_Y
#define MAX_SOFTWARE_ENDSTOP_Z
#define MAX_SOFTWARE_ENDSTOP_I
#define MAX_SOFTWARE_ENDSTOP_J
#define MAX_SOFTWARE_ENDSTOP_K
#define MAX_SOFTWARE_ENDSTOP_U
#define MAX_SOFTWARE_ENDSTOP_V
#define MAX_SOFTWARE_ENDSTOP_W
#endif
#if ANY(MIN_SOFTWARE_ENDSTOPS, MAX_SOFTWARE_ENDSTOPS)
//#define SOFT_ENDSTOPS_MENU_ITEM // Enable/Disable software endstops from the LCD
#endif
/**
* Filament Runout Sensors
* Mechanical or opto endstops are used to check for the presence of filament.
*
* IMPORTANT: Runout will only trigger if Marlin is aware that a print job is running.
* Marlin knows a print job is running when:
* 1. Running a print job from media started with M24.
* 2. The Print Job Timer has been started with M75.
* 3. The heaters were turned on and PRINTJOB_TIMER_AUTOSTART is enabled.
*
* RAMPS-based boards use SERVO3_PIN for the first runout sensor.
* For other boards you may need to define FIL_RUNOUT_PIN, FIL_RUNOUT2_PIN, etc.
*/
#define FILAMENT_RUNOUT_SENSOR
#if ENABLED(FILAMENT_RUNOUT_SENSOR)
#define FIL_RUNOUT_ENABLED_DEFAULT true // Enable the sensor on startup. Override with M412 followed by M500.
#define NUM_RUNOUT_SENSORS 1 // Number of sensors, up to one per extruder. Define a FIL_RUNOUT#_PIN for each.
#define FIL_RUNOUT_STATE LOW // Pin state indicating that filament is NOT present.
#define FIL_RUNOUT_PULLUP // Use internal pullup for filament runout pins.
//#define FIL_RUNOUT_PULLDOWN // Use internal pulldown for filament runout pins.
//#define WATCH_ALL_RUNOUT_SENSORS // Execute runout script on any triggering sensor, not only for the active extruder.
// This is automatically enabled for MIXING_EXTRUDERs.
// Override individually if the runout sensors vary
//#define FIL_RUNOUT1_STATE LOW
//#define FIL_RUNOUT1_PULLUP
//#define FIL_RUNOUT1_PULLDOWN
//#define FIL_RUNOUT2_STATE LOW
//#define FIL_RUNOUT2_PULLUP
//#define FIL_RUNOUT2_PULLDOWN
//#define FIL_RUNOUT3_STATE LOW
//#define FIL_RUNOUT3_PULLUP
//#define FIL_RUNOUT3_PULLDOWN
//#define FIL_RUNOUT4_STATE LOW
//#define FIL_RUNOUT4_PULLUP
//#define FIL_RUNOUT4_PULLDOWN
//#define FIL_RUNOUT5_STATE LOW
//#define FIL_RUNOUT5_PULLUP
//#define FIL_RUNOUT5_PULLDOWN
//#define FIL_RUNOUT6_STATE LOW
//#define FIL_RUNOUT6_PULLUP
//#define FIL_RUNOUT6_PULLDOWN
//#define FIL_RUNOUT7_STATE LOW
//#define FIL_RUNOUT7_PULLUP
//#define FIL_RUNOUT7_PULLDOWN
//#define FIL_RUNOUT8_STATE LOW
//#define FIL_RUNOUT8_PULLUP
//#define FIL_RUNOUT8_PULLDOWN
// Commands to execute on filament runout.
// With multiple runout sensors use the %c placeholder for the current tool in commands (e.g., "M600 T%c")
// NOTE: After 'M412 H1' the host handles filament runout and this script does not apply.
#define FILAMENT_RUNOUT_SCRIPT "M600"
// After a runout is detected, continue printing this length of filament
// before executing the runout script. Useful for a sensor at the end of
// a feed tube. Requires 4 bytes SRAM per sensor, plus 4 bytes overhead.
#define FILAMENT_RUNOUT_DISTANCE_MM 25
#ifdef FILAMENT_RUNOUT_DISTANCE_MM
// Enable this option to use an encoder disc that toggles the runout pin
// as the filament moves. (Be sure to set FILAMENT_RUNOUT_DISTANCE_MM
// large enough to avoid false positives.)
#define FILAMENT_MOTION_SENSOR
#if ENABLED(FILAMENT_MOTION_SENSOR)
//#define FILAMENT_SWITCH_AND_MOTION
#if ENABLED(FILAMENT_SWITCH_AND_MOTION)
#define NUM_MOTION_SENSORS 1 // Number of sensors, up to one per extruder. Define a FIL_MOTION#_PIN for each.
//#define FIL_MOTION1_PIN -1
// Override individually if the motion sensors vary
//#define FIL_MOTION1_STATE LOW
//#define FIL_MOTION1_PULLUP
//#define FIL_MOTION1_PULLDOWN
//#define FIL_MOTION2_STATE LOW
//#define FIL_MOTION2_PULLUP
//#define FIL_MOTION2_PULLDOWN
//#define FIL_MOTION3_STATE LOW
//#define FIL_MOTION3_PULLUP
//#define FIL_MOTION3_PULLDOWN
//#define FIL_MOTION4_STATE LOW
//#define FIL_MOTION4_PULLUP
//#define FIL_MOTION4_PULLDOWN
//#define FIL_MOTION5_STATE LOW
//#define FIL_MOTION5_PULLUP
//#define FIL_MOTION5_PULLDOWN
//#define FIL_MOTION6_STATE LOW
//#define FIL_MOTION6_PULLUP
//#define FIL_MOTION6_PULLDOWN
//#define FIL_MOTION7_STATE LOW
//#define FIL_MOTION7_PULLUP
//#define FIL_MOTION7_PULLDOWN
//#define FIL_MOTION8_STATE LOW
//#define FIL_MOTION8_PULLUP
//#define FIL_MOTION8_PULLDOWN
#endif
#endif
#endif
#endif
//===========================================================================
//=============================== Bed Leveling ==============================
//===========================================================================
// @section calibrate
/**
* Choose one of the options below to enable G29 Bed Leveling. The parameters
* and behavior of G29 will change depending on your selection.
*
* If using a Probe for Z Homing, enable Z_SAFE_HOMING also!
*
* - AUTO_BED_LEVELING_3POINT
* Probe 3 arbitrary points on the bed (that aren't collinear)
* You specify the XY coordinates of all 3 points.
* The result is a single tilted plane. Best for a flat bed.
*
* - AUTO_BED_LEVELING_LINEAR
* Probe several points in a grid.
* You specify the rectangle and the density of sample points.
* The result is a single tilted plane. Best for a flat bed.
*
* - AUTO_BED_LEVELING_BILINEAR
* Probe several points in a grid.
* You specify the rectangle and the density of sample points.
* The result is a mesh, best for large or uneven beds.
*
* - AUTO_BED_LEVELING_UBL (Unified Bed Leveling)
* A comprehensive bed leveling system combining the features and benefits
* of other systems. UBL also includes integrated Mesh Generation, Mesh
* Validation and Mesh Editing systems.
*
* - MESH_BED_LEVELING
* Probe a grid manually
* The result is a mesh, suitable for large or uneven beds. (See BILINEAR.)
* For machines without a probe, Mesh Bed Leveling provides a method to perform
* leveling in steps so you can manually adjust the Z height at each grid-point.
* With an LCD controller the process is guided step-by-step.
*/
//#define AUTO_BED_LEVELING_3POINT
//#define AUTO_BED_LEVELING_LINEAR
//#define AUTO_BED_LEVELING_BILINEAR
#define AUTO_BED_LEVELING_UBL
//#define MESH_BED_LEVELING
/**
* Normally G28 leaves leveling disabled on completion. Enable one of
* these options to restore the prior leveling state or to always enable
* leveling immediately after G28.
*/
#define RESTORE_LEVELING_AFTER_G28
//#define ENABLE_LEVELING_AFTER_G28
/**
* Auto-leveling needs preheating
*/
//#define PREHEAT_BEFORE_LEVELING
#if ENABLED(PREHEAT_BEFORE_LEVELING)
#define LEVELING_NOZZLE_TEMP 180 // (°C) Only applies to E0 at this time
#define LEVELING_BED_TEMP 50
#endif
/**
* Bed Distance Sensor
*
* Measures the distance from bed to nozzle with accuracy of 0.01mm.
* For information about this sensor https://github.com/markniu/Bed_Distance_sensor
* Uses I2C port, so it requires I2C library markyue/Panda_SoftMasterI2C.
*/
//#define BD_SENSOR
/**
* Enable detailed logging of G28, G29, M48, etc.
* Turn on with the command 'M111 S32'.
* NOTE: Requires a lot of PROGMEM!
*/
//#define DEBUG_LEVELING_FEATURE
#if ANY(MESH_BED_LEVELING, AUTO_BED_LEVELING_UBL, PROBE_MANUALLY)
// Set a height for the start of manual adjustment
#define MANUAL_PROBE_START_Z 0.2 // (mm) Comment out to use the last-measured height
#endif
#if ANY(MESH_BED_LEVELING, AUTO_BED_LEVELING_BILINEAR, AUTO_BED_LEVELING_UBL)
/**
* Gradually reduce leveling correction until a set height is reached,
* at which point movement will be level to the machine's XY plane.
* The height can be set with M420 Z<height>
*/
#define ENABLE_LEVELING_FADE_HEIGHT
#if ENABLED(ENABLE_LEVELING_FADE_HEIGHT)
#define DEFAULT_LEVELING_FADE_HEIGHT 10.0 // (mm) Default fade height.
#endif
/**
* For Cartesian machines, instead of dividing moves on mesh boundaries,
* split up moves into short segments like a Delta. This follows the
* contours of the bed more closely than edge-to-edge straight moves.
*/
#define SEGMENT_LEVELED_MOVES
#define LEVELED_SEGMENT_LENGTH 5.0 // (mm) Length of all segments (except the last one)
/**
* Enable the G26 Mesh Validation Pattern tool.
*/
#define G26_MESH_VALIDATION
#if ENABLED(G26_MESH_VALIDATION)
#define MESH_TEST_NOZZLE_SIZE 0.6 // (mm) Diameter of primary nozzle.
#define MESH_TEST_LAYER_HEIGHT 0.3 // (mm) Default layer height for G26.
#define MESH_TEST_HOTEND_TEMP 205 // (°C) Default nozzle temperature for G26.
#define MESH_TEST_BED_TEMP 60 // (°C) Default bed temperature for G26.
#define G26_XY_FEEDRATE 20 // (mm/s) Feedrate for G26 XY moves.
#define G26_XY_FEEDRATE_TRAVEL 100 // (mm/s) Feedrate for G26 XY travel moves.
#define G26_RETRACT_MULTIPLIER 1.0 // G26 Q (retraction) used by default between mesh test elements.
#endif
#endif
#if ANY(AUTO_BED_LEVELING_LINEAR, AUTO_BED_LEVELING_BILINEAR)
// Set the number of grid points per dimension.
#define GRID_MAX_POINTS_X 3
#define GRID_MAX_POINTS_Y GRID_MAX_POINTS_X
// Probe along the Y axis, advancing X after each column
//#define PROBE_Y_FIRST
#if ENABLED(AUTO_BED_LEVELING_BILINEAR)
// Beyond the probed grid, continue the implied tilt?
// Default is to maintain the height of the nearest edge.
//#define EXTRAPOLATE_BEYOND_GRID
//
// Subdivision of the grid by Catmull-Rom method.
// Synthesizes intermediate points to produce a more detailed mesh.
//
//#define ABL_BILINEAR_SUBDIVISION
#if ENABLED(ABL_BILINEAR_SUBDIVISION)
// Number of subdivisions between probe points
#define BILINEAR_SUBDIVISIONS 3
#endif
#endif
#elif ENABLED(AUTO_BED_LEVELING_UBL)
//===========================================================================
//========================= Unified Bed Leveling ============================
//===========================================================================
//#define MESH_EDIT_GFX_OVERLAY // Display a graphics overlay while editing the mesh
#define MESH_INSET 1 // Set Mesh bounds as an inset region of the bed
#define GRID_MAX_POINTS_X 10 // Don't use more than 15 points per axis, implementation limited.
#define GRID_MAX_POINTS_Y GRID_MAX_POINTS_X
//#define UBL_HILBERT_CURVE // Use Hilbert distribution for less travel when probing multiple points
//#define UBL_TILT_ON_MESH_POINTS // Use nearest mesh points with G29 J for better Z reference
//#define UBL_TILT_ON_MESH_POINTS_3POINT // Use nearest mesh points with G29 J0 (3-point)
#define UBL_MESH_EDIT_MOVES_Z // Sophisticated users prefer no movement of nozzle
#define UBL_SAVE_ACTIVE_ON_M500 // Save the currently active mesh in the current slot on M500
//#define UBL_Z_RAISE_WHEN_OFF_MESH 2.5 // When the nozzle is off the mesh, this value is used
// as the Z-Height correction value.
//#define UBL_MESH_WIZARD // Run several commands in a row to get a complete mesh
/**
* Probing not allowed within the position of an obstacle.
*/
//#define AVOID_OBSTACLES
#if ENABLED(AVOID_OBSTACLES)
#define CLIP_W 23 // Bed clip width, should be padded a few mm over its physical size
#define CLIP_H 14 // Bed clip height, should be padded a few mm over its physical size
// Obstacle Rectangles defined as { X1, Y1, X2, Y2 }
#define OBSTACLE1 { (X_BED_SIZE) / 4 - (CLIP_W) / 2, 0, (X_BED_SIZE) / 4 + (CLIP_W) / 2, CLIP_H }
#define OBSTACLE2 { (X_BED_SIZE) * 3 / 4 - (CLIP_W) / 2, 0, (X_BED_SIZE) * 3 / 4 + (CLIP_W) / 2, CLIP_H }
#define OBSTACLE3 { (X_BED_SIZE) / 4 - (CLIP_W) / 2, (Y_BED_SIZE) - (CLIP_H), (X_BED_SIZE) / 4 + (CLIP_W) / 2, Y_BED_SIZE }
#define OBSTACLE4 { (X_BED_SIZE) * 3 / 4 - (CLIP_W) / 2, (Y_BED_SIZE) - (CLIP_H), (X_BED_SIZE) * 3 / 4 + (CLIP_W) / 2, Y_BED_SIZE }
// The probed grid must be inset for G29 J. This is okay, since it is
// only used to compute a linear transformation for the mesh itself.
#define G29J_MESH_TILT_MARGIN ((CLIP_H) + 1)
#endif
#elif ENABLED(MESH_BED_LEVELING)
//===========================================================================
//=================================== Mesh ==================================
//===========================================================================
#define MESH_INSET 10 // Set Mesh bounds as an inset region of the bed
#define GRID_MAX_POINTS_X 3 // Don't use more than 7 points per axis, implementation limited.
#define GRID_MAX_POINTS_Y GRID_MAX_POINTS_X
//#define MESH_G28_REST_ORIGIN // After homing all axes ('G28' or 'G28 XYZ') rest Z at Z_MIN_POS
#endif // BED_LEVELING
/**
* Add a bed leveling sub-menu for ABL or MBL.
* Include a guided procedure if manual probing is enabled.
*/
//#define LCD_BED_LEVELING
#if ENABLED(LCD_BED_LEVELING)
#define MESH_EDIT_Z_STEP 0.025 // (mm) Step size while manually probing Z axis.
#define LCD_PROBE_Z_RANGE 4 // (mm) Z Range centered on Z_MIN_POS for LCD Z adjustment
//#define MESH_EDIT_MENU // Add a menu to edit mesh points
#endif
// Add a menu item to move between bed corners for manual bed adjustment
//#define LCD_BED_TRAMMING
#if ENABLED(LCD_BED_TRAMMING)
#define BED_TRAMMING_INSET_LFRB { 30, 30, 30, 30 } // (mm) Left, Front, Right, Back insets
#define BED_TRAMMING_HEIGHT 0.0 // (mm) Z height of nozzle at tramming points
#define BED_TRAMMING_Z_HOP 4.0 // (mm) Z height of nozzle between tramming points
//#define BED_TRAMMING_INCLUDE_CENTER // Move to the center after the last corner
//#define BED_TRAMMING_USE_PROBE
#if ENABLED(BED_TRAMMING_USE_PROBE)
#define BED_TRAMMING_PROBE_TOLERANCE 0.1 // (mm)
#define BED_TRAMMING_VERIFY_RAISED // After adjustment triggers the probe, re-probe to verify
//#define BED_TRAMMING_AUDIO_FEEDBACK
#endif
/**
* Corner Leveling Order
*
* Set 2 or 4 points. When 2 points are given, the 3rd is the center of the opposite edge.
*
* LF Left-Front RF Right-Front
* LB Left-Back RB Right-Back
*
* Examples:
*
* Default {LF,RB,LB,RF} {LF,RF} {LB,LF}
* LB --------- RB LB --------- RB LB --------- RB LB --------- RB
* | 4 3 | | 3 2 | | <3> | | 1 |
* | | | | | | | <3>|
* | 1 2 | | 1 4 | | 1 2 | | 2 |
* LF --------- RF LF --------- RF LF --------- RF LF --------- RF
*/
#define BED_TRAMMING_LEVELING_ORDER { LF, RF, RB, LB }
#endif
/**
* Commands to execute at the end of G29 probing.
* Useful to retract or move the Z probe out of the way.
*/
//#define Z_PROBE_END_SCRIPT "G1 Z10 F12000\nG1 X15 Y330\nG1 Z0.5\nG1 Z10"
// @section homing
// The center of the bed is at (X=0, Y=0)
//#define BED_CENTER_AT_0_0
// Manually set the home position. Leave these undefined for automatic settings.
// For DELTA this is the top-center of the Cartesian print volume.
//#define MANUAL_X_HOME_POS 0
//#define MANUAL_Y_HOME_POS 0
//#define MANUAL_Z_HOME_POS 0
//#define MANUAL_I_HOME_POS 0
//#define MANUAL_J_HOME_POS 0
//#define MANUAL_K_HOME_POS 0
//#define MANUAL_U_HOME_POS 0
//#define MANUAL_V_HOME_POS 0
//#define MANUAL_W_HOME_POS 0
/**
* Use "Z Safe Homing" to avoid homing with a Z probe outside the bed area.
*
* - Moves the Z probe (or nozzle) to a defined XY point before Z homing.
* - Allows Z homing only when XY positions are known and trusted.
* - If stepper drivers sleep, XY homing may be required again before Z homing.
*/
#define Z_SAFE_HOMING
#if ENABLED(Z_SAFE_HOMING)
#define Z_SAFE_HOMING_X_POINT X_CENTER // X point for Z homing
#define Z_SAFE_HOMING_Y_POINT Y_CENTER // Y point for Z homing
//#define Z_SAFE_HOMING_POINT_ABSOLUTE // Ignore home offsets (M206) for Z homing position
#endif
// Homing speeds (linear=mm/min, rotational=°/min)
#define HOMING_FEEDRATE_MM_M { (50*60), (50*60), (4*60) }
// Validate that endstops are triggered on homing moves
#define VALIDATE_HOMING_ENDSTOPS
// @section calibrate
/**
* Bed Skew Compensation
*
* This feature corrects for misalignment in the XYZ axes.
*
* Take the following steps to get the bed skew in the XY plane:
* 1. Print a test square (e.g., https://www.thingiverse.com/thing:2563185)
* 2. For XY_DIAG_AC measure the diagonal A to C
* 3. For XY_DIAG_BD measure the diagonal B to D
* 4. For XY_SIDE_AD measure the edge A to D
*
* Marlin automatically computes skew factors from these measurements.
* Skew factors may also be computed and set manually:
*
* - Compute AB : SQRT(2*AC*AC+2*BD*BD-4*AD*AD)/2
* - XY_SKEW_FACTOR : TAN(PI/2-ACOS((AC*AC-AB*AB-AD*AD)/(2*AB*AD)))
*
* If desired, follow the same procedure for XZ and YZ.
* Use these diagrams for reference:
*
* Y Z Z
* ^ B-------C ^ B-------C ^ B-------C
* | / / | / / | / /
* | / / | / / | / /
* | A-------D | A-------D | A-------D
* +-------------->X +-------------->X +-------------->Y
* XY_SKEW_FACTOR XZ_SKEW_FACTOR YZ_SKEW_FACTOR
*/
//#define SKEW_CORRECTION
#if ENABLED(SKEW_CORRECTION)
// Input all length measurements here:
#define XY_DIAG_AC 282.8427124746
#define XY_DIAG_BD 282.8427124746
#define XY_SIDE_AD 200
// Or, set the XY skew factor directly:
//#define XY_SKEW_FACTOR 0.0
//#define SKEW_CORRECTION_FOR_Z
#if ENABLED(SKEW_CORRECTION_FOR_Z)
#define XZ_DIAG_AC 282.8427124746
#define XZ_DIAG_BD 282.8427124746
#define YZ_DIAG_AC 282.8427124746
#define YZ_DIAG_BD 282.8427124746
#define YZ_SIDE_AD 200
// Or, set the Z skew factors directly:
//#define XZ_SKEW_FACTOR 0.0
//#define YZ_SKEW_FACTOR 0.0
#endif
// Enable this option for M852 to set skew at runtime
//#define SKEW_CORRECTION_GCODE
#endif
//=============================================================================
//============================= Additional Features ===========================
//=============================================================================
// @section eeprom
/**
* EEPROM
*
* Persistent storage to preserve configurable settings across reboots.
*
* M500 - Store settings to EEPROM.
* M501 - Read settings from EEPROM. (i.e., Throw away unsaved changes)
* M502 - Revert settings to "factory" defaults. (Follow with M500 to init the EEPROM.)
*/
#define EEPROM_SETTINGS // Persistent storage with M500 and M501
//#define DISABLE_M503 // Saves ~2700 bytes of flash. Disable for release!
#define EEPROM_CHITCHAT // Give feedback on EEPROM commands. Disable to save PROGMEM.
#define EEPROM_BOOT_SILENT // Keep M503 quiet and only give errors during first load
#if ENABLED(EEPROM_SETTINGS)
//#define EEPROM_AUTO_INIT // Init EEPROM automatically on any errors.
//#define EEPROM_INIT_NOW // Init EEPROM on first boot after a new build.
#endif
// @section host
//
// Host Keepalive
//
// When enabled Marlin will send a busy status message to the host
// every couple of seconds when it can't accept commands.
//
#define HOST_KEEPALIVE_FEATURE // Disable this if your host doesn't like keepalive messages
#define DEFAULT_KEEPALIVE_INTERVAL 2 // Number of seconds between "busy" messages. Set with M113.
#define BUSY_WHILE_HEATING // Some hosts require "busy" messages even during heating
// @section units
//
// G20/G21 Inch mode support
//
//#define INCH_MODE_SUPPORT
//
// M149 Set temperature units support
//
//#define TEMPERATURE_UNITS_SUPPORT
// @section temperature
//
// Preheat Constants - Up to 10 are supported without changes
//
#define PREHEAT_1_LABEL "PLA"
#define PREHEAT_1_TEMP_HOTEND 180
#define PREHEAT_1_TEMP_BED 70
#define PREHEAT_1_TEMP_CHAMBER 35
#define PREHEAT_1_FAN_SPEED 0 // Value from 0 to 255
#define PREHEAT_2_LABEL "ABS"
#define PREHEAT_2_TEMP_HOTEND 240
#define PREHEAT_2_TEMP_BED 110
#define PREHEAT_2_TEMP_CHAMBER 35
#define PREHEAT_2_FAN_SPEED 0 // Value from 0 to 255
#define PREHEAT_3_LABEL "PETG"
#define PREHEAT_3_TEMP_HOTEND 250
#define PREHEAT_3_TEMP_BED 70
#define PREHEAT_3_TEMP_CHAMBER 35
#define PREHEAT_3_FAN_SPEED 0 // Value from 0 to 255
// @section motion
/**
* Nozzle Park
*
* Park the nozzle at the given XYZ position on idle or G27.
*
* The "P" parameter controls the action applied to the Z axis:
*
* P0 (Default) If Z is below park Z raise the nozzle.
* P1 Raise the nozzle always to Z-park height.
* P2 Raise the nozzle by Z-park amount, limited to Z_MAX_POS.
*/
#define NOZZLE_PARK_FEATURE
#if ENABLED(NOZZLE_PARK_FEATURE)
// Specify a park position as { X, Y, Z_raise }
#define NOZZLE_PARK_POINT { (X_MIN_POS + 10), (Y_MAX_POS - 10), 20 }
#define NOZZLE_PARK_MOVE 0 // Park motion: 0 = XY Move, 1 = X Only, 2 = Y Only, 3 = X before Y, 4 = Y before X
#define NOZZLE_PARK_Z_RAISE_MIN 2 // (mm) Always raise Z by at least this distance
#define NOZZLE_PARK_XY_FEEDRATE 100 // (mm/s) X and Y axes feedrate (also used for delta Z axis)
#define NOZZLE_PARK_Z_FEEDRATE 5 // (mm/s) Z axis feedrate (not used for delta printers)
#endif
/**
* Clean Nozzle Feature
*
* Adds the G12 command to perform a nozzle cleaning process.
*
* Parameters:
* P Pattern
* S Strokes / Repetitions
* T Triangles (P1 only)
*
* Patterns:
* P0 Straight line (default). This process requires a sponge type material
* at a fixed bed location. "S" specifies strokes (i.e. back-forth motions)
* between the start / end points.
*
* P1 Zig-zag pattern between (X0, Y0) and (X1, Y1), "T" specifies the
* number of zig-zag triangles to do. "S" defines the number of strokes.
* Zig-zags are done in whichever is the narrower dimension.
* For example, "G12 P1 S1 T3" will execute:
*
* --
* | (X0, Y1) | /\ /\ /\ | (X1, Y1)
* | | / \ / \ / \ |
* A | | / \ / \ / \ |
* | | / \ / \ / \ |
* | (X0, Y0) | / \/ \/ \ | (X1, Y0)
* -- +--------------------------------+
* |________|_________|_________|
* T1 T2 T3
*
* P2 Circular pattern with middle at NOZZLE_CLEAN_CIRCLE_MIDDLE.
* "R" specifies the radius. "S" specifies the stroke count.
* Before starting, the nozzle moves to NOZZLE_CLEAN_START_POINT.
*
* Caveats: The ending Z should be the same as starting Z.
*/
//#define NOZZLE_CLEAN_FEATURE
#if ENABLED(NOZZLE_CLEAN_FEATURE)
#define NOZZLE_CLEAN_PATTERN_LINE // Provide 'G12 P0' - a simple linear cleaning pattern
#define NOZZLE_CLEAN_PATTERN_ZIGZAG // Provide 'G12 P1' - a zigzag cleaning pattern
#define NOZZLE_CLEAN_PATTERN_CIRCLE // Provide 'G12 P2' - a circular cleaning pattern
// Default pattern to use when 'P' is not provided to G12. One of the enabled options above.
#define NOZZLE_CLEAN_DEFAULT_PATTERN 0
#define NOZZLE_CLEAN_STROKES 12 // Default number of pattern repetitions
#if ENABLED(NOZZLE_CLEAN_PATTERN_ZIGZAG)
#define NOZZLE_CLEAN_TRIANGLES 3 // Default number of triangles
#endif
// Specify positions for each tool as { { X, Y, Z }, { X, Y, Z } }
// Dual hotend system may use { { -20, (Y_BED_SIZE / 2), (Z_MIN_POS + 1) }, { 420, (Y_BED_SIZE / 2), (Z_MIN_POS + 1) }}
#define NOZZLE_CLEAN_START_POINT { { 30, 30, (Z_MIN_POS + 1) } }
#define NOZZLE_CLEAN_END_POINT { { 100, 60, (Z_MIN_POS + 1) } }
#if ENABLED(NOZZLE_CLEAN_PATTERN_CIRCLE)
#define NOZZLE_CLEAN_CIRCLE_RADIUS 6.5 // (mm) Circular pattern radius
#define NOZZLE_CLEAN_CIRCLE_FN 10 // Circular pattern circle number of segments
#define NOZZLE_CLEAN_CIRCLE_MIDDLE NOZZLE_CLEAN_START_POINT // Middle point of circle
#endif
// Move the nozzle to the initial position after cleaning
#define NOZZLE_CLEAN_GOBACK
// For a purge/clean station that's always at the gantry height (thus no Z move)
//#define NOZZLE_CLEAN_NO_Z
// For a purge/clean station mounted on the X axis
//#define NOZZLE_CLEAN_NO_Y
// Require a minimum hotend temperature for cleaning
#define NOZZLE_CLEAN_MIN_TEMP 170
//#define NOZZLE_CLEAN_HEATUP // Heat up the nozzle instead of skipping wipe
// Explicit wipe G-code script applies to a G12 with no arguments.
//#define WIPE_SEQUENCE_COMMANDS "G1 X-17 Y25 Z10 F4000\nG1 Z1\nM114\nG1 X-17 Y25\nG1 X-17 Y95\nG1 X-17 Y25\nG1 X-17 Y95\nG1 X-17 Y25\nG1 X-17 Y95\nG1 X-17 Y25\nG1 X-17 Y95\nG1 X-17 Y25\nG1 X-17 Y95\nG1 X-17 Y25\nG1 X-17 Y95\nG1 Z15\nM400\nG0 X-10.0 Y-9.0"
#endif
// @section host
/**
* Print Job Timer
*
* Automatically start and stop the print job timer on M104/M109/M140/M190/M141/M191.
* The print job timer will only be stopped if the bed/chamber target temp is
* below BED_MINTEMP/CHAMBER_MINTEMP.
*
* M104 (hotend, no wait) - high temp = none, low temp = stop timer
* M109 (hotend, wait) - high temp = start timer, low temp = stop timer
* M140 (bed, no wait) - high temp = none, low temp = stop timer
* M190 (bed, wait) - high temp = start timer, low temp = none
* M141 (chamber, no wait) - high temp = none, low temp = stop timer
* M191 (chamber, wait) - high temp = start timer, low temp = none
*
* For M104/M109, high temp is anything over EXTRUDE_MINTEMP / 2.
* For M140/M190, high temp is anything over BED_MINTEMP.
* For M141/M191, high temp is anything over CHAMBER_MINTEMP.
*
* The timer can also be controlled with the following commands:
*
* M75 - Start the print job timer
* M76 - Pause the print job timer
* M77 - Stop the print job timer
*/
#define PRINTJOB_TIMER_AUTOSTART
// @section stats
/**
* Print Counter
*
* Track statistical data such as:
*
* - Total print jobs
* - Total successful print jobs
* - Total failed print jobs
* - Total time printing
*
* View the current statistics with M78.
*/
#define PRINTCOUNTER
#if ENABLED(PRINTCOUNTER)
#define PRINTCOUNTER_SAVE_INTERVAL 60 // (minutes) EEPROM save interval during print. A value of 0 will save stats at end of print.
#endif
// @section security
/**
* Password
*
* Set a numerical password for the printer which can be requested:
*
* - When the printer boots up
* - Upon opening the 'Print from Media' Menu
* - When SD printing is completed or aborted
*
* The following G-codes can be used:
*
* M510 - Lock Printer. Blocks all commands except M511.
* M511 - Unlock Printer.
* M512 - Set, Change and Remove Password.
*
* If you forget the password and get locked out you'll need to re-flash
* the firmware with the feature disabled, reset EEPROM, and (optionally)
* re-flash the firmware again with this feature enabled.
*/
//#define PASSWORD_FEATURE
#if ENABLED(PASSWORD_FEATURE)
#define PASSWORD_LENGTH 4 // (#) Number of digits (1-9). 3 or 4 is recommended
#define PASSWORD_ON_STARTUP
#define PASSWORD_UNLOCK_GCODE // Unlock with the M511 P<password> command. Disable to prevent brute-force attack.
#define PASSWORD_CHANGE_GCODE // Change the password with M512 P<old> S<new>.
//#define PASSWORD_ON_SD_PRINT_MENU // This does not prevent G-codes from running
//#define PASSWORD_AFTER_SD_PRINT_END
//#define PASSWORD_AFTER_SD_PRINT_ABORT
//#include "Configuration_Secure.h" // External file with PASSWORD_DEFAULT_VALUE
#endif
//=============================================================================
//============================= LCD and SD support ============================
//=============================================================================
// @section interface
/**
* LCD LANGUAGE
*
* Select the language to display on the LCD. These languages are available:
*
* en, an, bg, ca, cz, da, de, el, el_CY, es, eu, fi, fr, gl, hr, hu, it,
* jp_kana, ko_KR, nl, pl, pt, pt_br, ro, ru, sk, sv, tr, uk, vi, zh_CN, zh_TW
*
* :{ 'en':'English', 'an':'Aragonese', 'bg':'Bulgarian', 'ca':'Catalan', 'cz':'Czech', 'da':'Danish', 'de':'German', 'el':'Greek (Greece)', 'el_CY':'Greek (Cyprus)', 'es':'Spanish', 'eu':'Basque-Euskera', 'fi':'Finnish', 'fr':'French', 'gl':'Galician', 'hr':'Croatian', 'hu':'Hungarian', 'it':'Italian', 'jp_kana':'Japanese', 'ko_KR':'Korean (South Korea)', 'nl':'Dutch', 'pl':'Polish', 'pt':'Portuguese', 'pt_br':'Portuguese (Brazilian)', 'ro':'Romanian', 'ru':'Russian', 'sk':'Slovak', 'sv':'Swedish', 'tr':'Turkish', 'uk':'Ukrainian', 'vi':'Vietnamese', 'zh_CN':'Chinese (Simplified)', 'zh_TW':'Chinese (Traditional)' }
*/
#define LCD_LANGUAGE en
/**
* LCD Character Set
*
* Note: This option is NOT applicable to Graphical Displays.
*
* All character-based LCDs provide ASCII plus one of these
* language extensions:
*
* - JAPANESE ... the most common
* - WESTERN ... with more accented characters
* - CYRILLIC ... for the Russian language
*
* To determine the language extension installed on your controller:
*
* - Compile and upload with LCD_LANGUAGE set to 'test'
* - Click the controller to view the LCD menu
* - The LCD will display Japanese, Western, or Cyrillic text
*
* See https://marlinfw.org/docs/development/lcd_language.html
*
* :['JAPANESE', 'WESTERN', 'CYRILLIC']
*/
#define DISPLAY_CHARSET_HD44780 JAPANESE
/**
* Info Screen Style (0:Classic, 1:Průša)
*
* :[0:'Classic', 1:'Průša']
*/
#define LCD_INFO_SCREEN_STYLE 0
/**
* SD CARD
*
* SD Card support is disabled by default. If your controller has an SD slot,
* you must uncomment the following option or it won't work.
*/
#define SDSUPPORT
/**
* SD CARD: ENABLE CRC
*
* Use CRC checks and retries on the SD communication.
*/
//#define SD_CHECK_AND_RETRY
/**
* LCD Menu Items
*
* Disable all menus and only display the Status Screen, or
* just remove some extraneous menu items to recover space.
*/
//#define NO_LCD_MENUS
//#define SLIM_LCD_MENUS
//
// ENCODER SETTINGS
//
// This option overrides the default number of encoder pulses needed to
// produce one step. Should be increased for high-resolution encoders.
//
//#define ENCODER_PULSES_PER_STEP 4
//
// Use this option to override the number of step signals required to
// move between next/prev menu items.
//
//#define ENCODER_STEPS_PER_MENU_ITEM 1
/**
* Encoder Direction Options
*
* Test your encoder's behavior first with both options disabled.
*
* Reversed Value Edit and Menu Nav? Enable REVERSE_ENCODER_DIRECTION.
* Reversed Menu Navigation only? Enable REVERSE_MENU_DIRECTION.
* Reversed Value Editing only? Enable BOTH options.
*/
//
// This option reverses the encoder direction everywhere.
//
// Set this option if CLOCKWISE causes values to DECREASE
//
//#define REVERSE_ENCODER_DIRECTION
//
// This option reverses the encoder direction for navigating LCD menus.
//
// If CLOCKWISE normally moves DOWN this makes it go UP.
// If CLOCKWISE normally moves UP this makes it go DOWN.
//
//#define REVERSE_MENU_DIRECTION
//
// This option reverses the encoder direction for Select Screen.
//
// If CLOCKWISE normally moves LEFT this makes it go RIGHT.
// If CLOCKWISE normally moves RIGHT this makes it go LEFT.
//
//#define REVERSE_SELECT_DIRECTION
//
// Encoder EMI Noise Filter
//
// This option increases encoder samples to filter out phantom encoder clicks caused by EMI noise.
//
//#define ENCODER_NOISE_FILTER
#if ENABLED(ENCODER_NOISE_FILTER)
#define ENCODER_SAMPLES 10
#endif
//
// Individual Axis Homing
//
// Add individual axis homing items (Home X, Home Y, and Home Z) to the LCD menu.
//
//#define INDIVIDUAL_AXIS_HOMING_MENU
//#define INDIVIDUAL_AXIS_HOMING_SUBMENU
//
// SPEAKER/BUZZER
//
// If you have a speaker that can produce tones, enable it here.
// By default Marlin assumes you have a buzzer with a fixed frequency.
//
//#define SPEAKER
//
// The duration and frequency for the UI feedback sound.
// Set these to 0 to disable audio feedback in the LCD menus.
//
// Note: Test audio output with the G-Code:
// M300 S<frequency Hz> P<duration ms>
//
//#define LCD_FEEDBACK_FREQUENCY_DURATION_MS 2
//#define LCD_FEEDBACK_FREQUENCY_HZ 5000
//
// Tone queue size, used to keep beeps from blocking execution.
// Default is 4, or override here. Costs 4 bytes of SRAM per entry.
//
//#define TONE_QUEUE_LENGTH 4
//
// A sequence of tones to play at startup, in pairs of tone (Hz), duration (ms).
// Silence in-between tones.
//
//#define STARTUP_TUNE { 698, 300, 0, 50, 523, 50, 0, 25, 494, 50, 0, 25, 523, 100, 0, 50, 554, 300, 0, 100, 523, 300 }
//=============================================================================
//======================== LCD / Controller Selection =========================
//======================== (Character-based LCDs) =========================
//=============================================================================
// @section lcd
//
// RepRapDiscount Smart Controller.
// https://reprap.org/wiki/RepRapDiscount_Smart_Controller
//
// Note: Usually sold with a white PCB.
//
//#define REPRAP_DISCOUNT_SMART_CONTROLLER
//
// GT2560 (YHCB2004) LCD Display
//
// Requires Testato, Koepel softwarewire library and
// Andriy Golovnya's LiquidCrystal_AIP31068 library.
//
//#define YHCB2004
//
// Original RADDS LCD Display+Encoder+SDCardReader
// http://doku.radds.org/dokumentation/lcd-display/
//
//#define RADDS_DISPLAY
//
// ULTIMAKER Controller.
//
//#define ULTIMAKERCONTROLLER
//
// ULTIPANEL as seen on Thingiverse.
//
//#define ULTIPANEL
//
// PanelOne from T3P3 (via RAMPS 1.4 AUX2/AUX3)
// https://reprap.org/wiki/PanelOne
//
//#define PANEL_ONE
//
// GADGETS3D G3D LCD/SD Controller
// https://reprap.org/wiki/RAMPS_1.3/1.4_GADGETS3D_Shield_with_Panel
//
// Note: Usually sold with a blue PCB.
//
//#define G3D_PANEL
//
// RigidBot Panel V1.0
// http://www.inventapart.com/
//
//#define RIGIDBOT_PANEL
//
// Makeboard 3D Printer Parts 3D Printer Mini Display 1602 Mini Controller
// https://www.aliexpress.com/item/32765887917.html
//
//#define MAKEBOARD_MINI_2_LINE_DISPLAY_1602
//
// ANET and Tronxy 20x4 Controller
//
//#define ZONESTAR_LCD // Requires ADC_KEYPAD_PIN to be assigned to an analog pin.
// This LCD is known to be susceptible to electrical interference
// which scrambles the display. Pressing any button clears it up.
// This is a LCD2004 display with 5 analog buttons.
//
// Generic 16x2, 16x4, 20x2, or 20x4 character-based LCD.
//
//#define ULTRA_LCD
//=============================================================================
//======================== LCD / Controller Selection =========================
//===================== (I2C and Shift-Register LCDs) =====================
//=============================================================================
//
// CONTROLLER TYPE: I2C
//
// Note: These controllers require the installation of Arduino's LiquidCrystal_I2C
// library. For more info: https://github.com/kiyoshigawa/LiquidCrystal_I2C
//
//
// Elefu RA Board Control Panel
// https://web.archive.org/web/20140823033947/http://www.elefu.com/index.php?route=product/product&product_id=53
//
//#define RA_CONTROL_PANEL
//
// Sainsmart (YwRobot) LCD Displays
//
// These require F.Malpartida's LiquidCrystal_I2C library
// https://bitbucket.org/fmalpartida/new-liquidcrystal/wiki/Home
//
//#define LCD_SAINSMART_I2C_1602
//#define LCD_SAINSMART_I2C_2004
//
// Generic LCM1602 LCD adapter
//
//#define LCM1602
//
// PANELOLU2 LCD with status LEDs,
// separate encoder and click inputs.
//
// Note: This controller requires Arduino's LiquidTWI2 library v1.2.3 or later.
// For more info: https://github.com/lincomatic/LiquidTWI2
//
// Note: The PANELOLU2 encoder click input can either be directly connected to
// a pin (if BTN_ENC defined to != -1) or read through I2C (when BTN_ENC == -1).
//
//#define LCD_I2C_PANELOLU2
//
// Panucatt VIKI LCD with status LEDs,
// integrated click & L/R/U/D buttons, separate encoder inputs.
//
//#define LCD_I2C_VIKI
//
// CONTROLLER TYPE: Shift register panels
//
//
// 2-wire Non-latching LCD SR from https://goo.gl/aJJ4sH
// LCD configuration: https://reprap.org/wiki/SAV_3D_LCD
//
//#define SAV_3DLCD
//
// 3-wire SR LCD with strobe using 74HC4094
// https://github.com/mikeshub/SailfishLCD
// Uses the code directly from Sailfish
//
//#define FF_INTERFACEBOARD
//
// TFT GLCD Panel with Marlin UI
// Panel connected to main board by SPI or I2C interface.
// See https://github.com/Serhiy-K/TFTGLCDAdapter
//
//#define TFTGLCD_PANEL_SPI
//#define TFTGLCD_PANEL_I2C
//=============================================================================
//======================= LCD / Controller Selection =======================
//========================= (Graphical LCDs) ========================
//=============================================================================
//
// CONTROLLER TYPE: Graphical 128x64 (DOGM)
//
// IMPORTANT: The U8glib library is required for Graphical Display!
// https://github.com/olikraus/U8glib_Arduino
//
// NOTE: If the LCD is unresponsive you may need to reverse the plugs.
//
//
// RepRapDiscount FULL GRAPHIC Smart Controller
// https://reprap.org/wiki/RepRapDiscount_Full_Graphic_Smart_Controller
//
//#define REPRAP_DISCOUNT_FULL_GRAPHIC_SMART_CONTROLLER
//
// K.3D Full Graphic Smart Controller
//
//#define K3D_FULL_GRAPHIC_SMART_CONTROLLER
//
// ReprapWorld Graphical LCD
// https://reprapworld.com/electronics/3d-printer-modules/autonomous-printing/graphical-lcd-screen-v1-0/
//
//#define REPRAPWORLD_GRAPHICAL_LCD
//
// Activate one of these if you have a Panucatt Devices
// Viki 2.0 or mini Viki with Graphic LCD
// https://www.panucatt.com
//
//#define VIKI2
//#define miniVIKI
//
// Alfawise Ex8 printer LCD marked as WYH L12864 COG
//
//#define WYH_L12864
//
// MakerLab Mini Panel with graphic
// controller and SD support - https://reprap.org/wiki/Mini_panel
//
//#define MINIPANEL
//
// MaKr3d Makr-Panel with graphic controller and SD support.
// https://reprap.org/wiki/MaKr3d_MaKrPanel
//
//#define MAKRPANEL
//
// Adafruit ST7565 Full Graphic Controller.
// https://github.com/eboston/Adafruit-ST7565-Full-Graphic-Controller/
//
//#define ELB_FULL_GRAPHIC_CONTROLLER
//
// BQ LCD Smart Controller shipped by
// default with the BQ Hephestos 2 and Witbox 2.
//
//#define BQ_LCD_SMART_CONTROLLER
//
// Cartesio UI
// http://mauk.cc/webshop/cartesio-shop/electronics/user-interface
//
//#define CARTESIO_UI
//
// LCD for Melzi Card with Graphical LCD
//
//#define LCD_FOR_MELZI
//
// Original Ulticontroller from Ultimaker 2 printer with SSD1309 I2C display and encoder
// https://github.com/Ultimaker/Ultimaker2/tree/master/1249_Ulticontroller_Board_(x1)
//
//#define ULTI_CONTROLLER
//
// MKS MINI12864 with graphic controller and SD support
// https://reprap.org/wiki/MKS_MINI_12864
//
//#define MKS_MINI_12864
//
// MKS MINI12864 V3 is an alias for FYSETC_MINI_12864_2_1. Type A/B. NeoPixel RGB Backlight.
//
//#define MKS_MINI_12864_V3
//
// MKS LCD12864A/B with graphic controller and SD support. Follows MKS_MINI_12864 pinout.
// https://www.aliexpress.com/item/33018110072.html
//
//#define MKS_LCD12864A
//#define MKS_LCD12864B
//
// FYSETC variant of the MINI12864 graphic controller with SD support
// https://wiki.fysetc.com/Mini12864_Panel/
//
//#define FYSETC_MINI_12864_X_X // Type C/D/E/F. No tunable RGB Backlight by default
//#define FYSETC_MINI_12864_1_2 // Type C/D/E/F. Simple RGB Backlight (always on)
//#define FYSETC_MINI_12864_2_0 // Type A/B. Discreet RGB Backlight
//#define FYSETC_MINI_12864_2_1 // Type A/B. NeoPixel RGB Backlight
//#define FYSETC_GENERIC_12864_1_1 // Larger display with basic ON/OFF backlight.
//
// BigTreeTech Mini 12864 V1.0 is an alias for FYSETC_MINI_12864_2_1. Type A/B. NeoPixel RGB Backlight.
//
//#define BTT_MINI_12864_V1
//
// Factory display for Creality CR-10
// https://www.aliexpress.com/item/32833148327.html
//
// This is RAMPS-compatible using a single 10-pin connector.
// (For CR-10 owners who want to replace the Melzi Creality board but retain the display)
//
//#define CR10_STOCKDISPLAY
//
// Ender-2 OEM display, a variant of the MKS_MINI_12864
//
//#define ENDER2_STOCKDISPLAY
//
// ANET and Tronxy Graphical Controller
//
// Anet 128x64 full graphics lcd with rotary encoder as used on Anet A6
// A clone of the RepRapDiscount full graphics display but with
// different pins/wiring (see pins_ANET_10.h). Enable one of these.
//
//#define ANET_FULL_GRAPHICS_LCD
//#define ANET_FULL_GRAPHICS_LCD_ALT_WIRING
//
// AZSMZ 12864 LCD with SD
// https://www.aliexpress.com/item/32837222770.html
//
//#define AZSMZ_12864
//
// Silvergate GLCD controller
// https://github.com/android444/Silvergate
//
//#define SILVER_GATE_GLCD_CONTROLLER
//
// eMotion Tech LCD with SD
// https://www.reprap-france.com/produit/1234568748-ecran-graphique-128-x-64-points-2-1
//
//#define EMOTION_TECH_LCD
//=============================================================================
//============================== OLED Displays ==============================
//=============================================================================
//
// SSD1306 OLED full graphics generic display
//
//#define U8GLIB_SSD1306
//
// SAV OLEd LCD module support using either SSD1306 or SH1106 based LCD modules
//
//#define SAV_3DGLCD
#if ENABLED(SAV_3DGLCD)
#define U8GLIB_SSD1306
//#define U8GLIB_SH1106
#endif
//
// TinyBoy2 128x64 OLED / Encoder Panel
//
//#define OLED_PANEL_TINYBOY2
//
// MKS OLED 1.3" 128×64 Full Graphics Controller
// https://reprap.org/wiki/MKS_12864OLED
//
// Tiny, but very sharp OLED display
//
//#define MKS_12864OLED // Uses the SH1106 controller (default)
//#define MKS_12864OLED_SSD1306 // Uses the SSD1306 controller
//
// Zonestar OLED 128×64 Full Graphics Controller
//
//#define ZONESTAR_12864LCD // Graphical (DOGM) with ST7920 controller
//#define ZONESTAR_12864OLED // 1.3" OLED with SH1106 controller (default)
//#define ZONESTAR_12864OLED_SSD1306 // 0.96" OLED with SSD1306 controller
//
// Einstart S OLED SSD1306
//
//#define U8GLIB_SH1106_EINSTART
//
// Overlord OLED display/controller with i2c buzzer and LEDs
//
//#define OVERLORD_OLED
//
// FYSETC OLED 2.42" 128×64 Full Graphics Controller with WS2812 RGB
// Where to find : https://www.aliexpress.com/item/4000345255731.html
//#define FYSETC_242_OLED_12864 // Uses the SSD1309 controller
//
// K.3D SSD1309 OLED 2.42" 128×64 Full Graphics Controller
//
//#define K3D_242_OLED_CONTROLLER // Software SPI
//=============================================================================
//========================== Extensible UI Displays ===========================
//=============================================================================
/**
* DGUS Touch Display with DWIN OS. (Choose one.)
*
* ORIGIN (Marlin DWIN_SET)
* - Download https://github.com/coldtobi/Marlin_DGUS_Resources
* - Copy the downloaded DWIN_SET folder to the SD card.
* - Product: https://www.aliexpress.com/item/32993409517.html
*
* FYSETC (Supplier default)
* - Download https://github.com/FYSETC/FYSTLCD-2.0
* - Copy the downloaded SCREEN folder to the SD card.
* - Product: https://www.aliexpress.com/item/32961471929.html
*
* HIPRECY (Supplier default)
* - Download https://github.com/HiPrecy/Touch-Lcd-LEO
* - Copy the downloaded DWIN_SET folder to the SD card.
*
* MKS (MKS-H43) (Supplier default)
* - Download https://github.com/makerbase-mks/MKS-H43
* - Copy the downloaded DWIN_SET folder to the SD card.
* - Product: https://www.aliexpress.com/item/1005002008179262.html
*
* RELOADED (T5UID1)
* - Download https://github.com/Neo2003/DGUS-reloaded/releases
* - Copy the downloaded DWIN_SET folder to the SD card.
*
* IA_CREALITY (T5UID1)
* - Download https://github.com/InsanityAutomation/Marlin/raw/CrealityDwin_2.0/TM3D_Combined480272_Landscape_V7.7z
* - Copy the downloaded DWIN_SET folder to the SD card.
*
* Flash display with DGUS Displays for Marlin:
* - Format the SD card to FAT32 with an allocation size of 4kb.
* - Download files as specified for your type of display.
* - Plug the microSD card into the back of the display.
* - Boot the display and wait for the update to complete.
*
* :[ 'ORIGIN', 'FYSETC', 'HYPRECY', 'MKS', 'RELOADED', 'IA_CREALITY' ]
*/
//#define DGUS_LCD_UI ORIGIN
#if DGUS_UI_IS(MKS)
#define USE_MKS_GREEN_UI
#elif DGUS_UI_IS(IA_CREALITY)
//#define LCD_SCREEN_ROTATE 90 // Portrait Mode or 800x480 displays
//#define IA_CREALITY_BOOT_DELAY 1500 // (ms)
#endif
//
// Touch-screen LCD for Malyan M200/M300 printers
//
//#define MALYAN_LCD
//
// Touch UI for FTDI EVE (FT800/FT810) displays
// See Configuration_adv.h for all configuration options.
//
//#define TOUCH_UI_FTDI_EVE
//
// Touch-screen LCD for Anycubic Chiron
//
//#define ANYCUBIC_LCD_CHIRON
//
// Touch-screen LCD for Anycubic i3 Mega
//
//#define ANYCUBIC_LCD_I3MEGA
#if ENABLED(ANYCUBIC_LCD_I3MEGA)
//#define ANYCUBIC_LCD_GCODE_EXT // Add ".gcode" to menu entries for DGUS clone compatibility
#endif
//
// Touch-screen LCD for Anycubic Vyper
//
//#define ANYCUBIC_LCD_VYPER
//
// 320x240 Nextion 2.8" serial TFT Resistive Touch Screen NX3224T028
//
//#define NEXTION_TFT
//
// Third-party or vendor-customized controller interfaces.
// Sources should be installed in 'src/lcd/extui'.
//
//#define EXTENSIBLE_UI
#if ENABLED(EXTENSIBLE_UI)
//#define EXTUI_LOCAL_BEEPER // Enables use of local Beeper pin with external display
#endif
//=============================================================================
//=============================== Graphical TFTs ==============================
//=============================================================================
/**
* Specific TFT Model Presets. Enable one of the following options
* or enable TFT_GENERIC and set sub-options.
*/
//
// 480x320, 3.5", SPI Display with Rotary Encoder from MKS
// Usually paired with MKS Robin Nano V2 & V3
//
//#define MKS_TS35_V2_0
//
// 320x240, 2.4", FSMC Display From MKS
// Usually paired with MKS Robin Nano V1.2
//
//#define MKS_ROBIN_TFT24
//
// 320x240, 2.8", FSMC Display From MKS
// Usually paired with MKS Robin Nano V1.2
//
//#define MKS_ROBIN_TFT28
//
// 320x240, 3.2", FSMC Display From MKS
// Usually paired with MKS Robin Nano V1.2
//
//#define MKS_ROBIN_TFT32
//
// 480x320, 3.5", FSMC Display From MKS
// Usually paired with MKS Robin Nano V1.2
//
//#define MKS_ROBIN_TFT35
//
// 480x272, 4.3", FSMC Display From MKS
//
//#define MKS_ROBIN_TFT43
//
// 320x240, 3.2", FSMC Display From MKS
// Usually paired with MKS Robin
//
//#define MKS_ROBIN_TFT_V1_1R
//
// 480x320, 3.5", FSMC Stock Display from Tronxy
//
//#define TFT_TRONXY_X5SA
//
// 480x320, 3.5", FSMC Stock Display from AnyCubic
//
//#define ANYCUBIC_TFT35
//
// 320x240, 2.8", FSMC Stock Display from Longer/Alfawise
//
//#define LONGER_LK_TFT28
//
// 320x240, 2.8", FSMC Stock Display from ET4
//
//#define ANET_ET4_TFT28
//
// 480x320, 3.5", FSMC Stock Display from ET5
//
//#define ANET_ET5_TFT35
//
// 1024x600, 7", RGB Stock Display with Rotary Encoder from BIQU-BX
//
//#define BIQU_BX_TFT70
//
// 480x320, 3.5", SPI Stock Display with Rotary Encoder from BIQU B1 SE Series
//
//#define BTT_TFT35_SPI_V1_0
//
// Generic TFT with detailed options
//
//#define TFT_GENERIC
#if ENABLED(TFT_GENERIC)
// :[ 'AUTO', 'ST7735', 'ST7789', 'ST7796', 'R61505', 'ILI9328', 'ILI9341', 'ILI9488' ]
#define TFT_DRIVER AUTO
// Interface. Enable one of the following options:
//#define TFT_INTERFACE_FSMC
//#define TFT_INTERFACE_SPI
// TFT Resolution. Enable one of the following options:
//#define TFT_RES_320x240
//#define TFT_RES_480x272
//#define TFT_RES_480x320
//#define TFT_RES_1024x600
#endif
/**
* TFT UI - User Interface Selection. Enable one of the following options:
*
* TFT_CLASSIC_UI - Emulated DOGM - 128x64 Upscaled
* TFT_COLOR_UI - Marlin Default Menus, Touch Friendly, using full TFT capabilities
* TFT_LVGL_UI - A Modern UI using LVGL
*
* For LVGL_UI also copy the 'assets' folder from the build directory to the
* root of your SD card, together with the compiled firmware.
*/
//#define TFT_CLASSIC_UI
//#define TFT_COLOR_UI
//#define TFT_LVGL_UI
#if ENABLED(TFT_COLOR_UI)
/**
* TFT Font for Color_UI. Choose one of the following:
*
* NOTOSANS - Default font with anti-aliasing. Supports Latin Extended and non-Latin characters.
* UNIFONT - Lightweight font, no anti-aliasing. Supports Latin Extended and non-Latin characters.
* HELVETICA - Lightweight font, no anti-aliasing. Supports Basic Latin (0x0020-0x007F) and Latin-1 Supplement (0x0080-0x00FF) characters only.
*/
#define TFT_FONT NOTOSANS
//#define TFT_SHARED_IO // I/O is shared between TFT display and other devices. Disable async data transfer.
#endif
#if ENABLED(TFT_LVGL_UI)
//#define MKS_WIFI_MODULE // MKS WiFi module
#endif
/**
* TFT Rotation. Set to one of the following values:
*
* TFT_ROTATE_90, TFT_ROTATE_90_MIRROR_X, TFT_ROTATE_90_MIRROR_Y,
* TFT_ROTATE_180, TFT_ROTATE_180_MIRROR_X, TFT_ROTATE_180_MIRROR_Y,
* TFT_ROTATE_270, TFT_ROTATE_270_MIRROR_X, TFT_ROTATE_270_MIRROR_Y,
* TFT_MIRROR_X, TFT_MIRROR_Y, TFT_NO_ROTATION
*/
//#define TFT_ROTATION TFT_NO_ROTATION
//=============================================================================
//============================ Other Controllers ============================
//=============================================================================
//
// Ender-3 v2 OEM display. A DWIN display with Rotary Encoder.
//
//#define DWIN_CREALITY_LCD // Creality UI
//#define DWIN_LCD_PROUI // Pro UI by MRiscoC
//#define DWIN_CREALITY_LCD_JYERSUI // Jyers UI by Jacob Myers
//#define DWIN_MARLINUI_PORTRAIT // MarlinUI (portrait orientation)
//#define DWIN_MARLINUI_LANDSCAPE // MarlinUI (landscape orientation)
//
// Touch Screen Settings
//
//#define TOUCH_SCREEN
#if ENABLED(TOUCH_SCREEN)
#define BUTTON_DELAY_EDIT 50 // (ms) Button repeat delay for edit screens
#define BUTTON_DELAY_MENU 250 // (ms) Button repeat delay for menus
//#define DISABLE_ENCODER // Disable the click encoder, if any
//#define TOUCH_IDLE_SLEEP_MINS 5 // (minutes) Display Sleep after a period of inactivity. Set with M255 S.
#define TOUCH_SCREEN_CALIBRATION
//#define TOUCH_CALIBRATION_X 12316
//#define TOUCH_CALIBRATION_Y -8981
//#define TOUCH_OFFSET_X -43
//#define TOUCH_OFFSET_Y 257
//#define TOUCH_ORIENTATION TOUCH_LANDSCAPE
#if ALL(TOUCH_SCREEN_CALIBRATION, EEPROM_SETTINGS)
#define TOUCH_CALIBRATION_AUTO_SAVE // Auto save successful calibration values to EEPROM
#endif
#if ENABLED(TFT_COLOR_UI)
//#define SINGLE_TOUCH_NAVIGATION
#endif
#endif
//
// RepRapWorld REPRAPWORLD_KEYPAD v1.1
// https://reprapworld.com/products/electronics/ramps/keypad_v1_0_fully_assembled/
//
//#define REPRAPWORLD_KEYPAD
//#define REPRAPWORLD_KEYPAD_MOVE_STEP 10.0 // (mm) Distance to move per key-press
//
// EasyThreeD ET-4000+ with button input and status LED
//
//#define EASYTHREED_UI
//=============================================================================
//=============================== Extra Features ==============================
//=============================================================================
// @section fans
// Set number of user-controlled fans. Disable to use all board-defined fans.
// :[1,2,3,4,5,6,7,8]
//#define NUM_M106_FANS 1
// Use software PWM to drive the fan, as for the heaters. This uses a very low frequency
// which is not as annoying as with the hardware PWM. On the other hand, if this frequency
// is too low, you should also increment SOFT_PWM_SCALE.
//#define FAN_SOFT_PWM
// Incrementing this by 1 will double the software PWM frequency,
// affecting heaters, and the fan if FAN_SOFT_PWM is enabled.
// However, control resolution will be halved for each increment;
// at zero value, there are 128 effective control positions.
// :[0,1,2,3,4,5,6,7]
#define SOFT_PWM_SCALE 0
// If SOFT_PWM_SCALE is set to a value higher than 0, dithering can
// be used to mitigate the associated resolution loss. If enabled,
// some of the PWM cycles are stretched so on average the desired
// duty cycle is attained.
//#define SOFT_PWM_DITHER
// @section extras
// Support for the BariCUDA Paste Extruder
//#define BARICUDA
// @section lights
// Temperature status LEDs that display the hotend and bed temperature.
// If all hotends, bed temperature, and target temperature are under 54C
// then the BLUE led is on. Otherwise the RED led is on. (1C hysteresis)
//#define TEMP_STAT_LEDS
// Support for BlinkM/CyzRgb
//#define BLINKM
// Support for PCA9632 PWM LED driver
//#define PCA9632
// Support for PCA9533 PWM LED driver
//#define PCA9533
/**
* RGB LED / LED Strip Control
*
* Enable support for an RGB LED connected to 5V digital pins, or
* an RGB Strip connected to MOSFETs controlled by digital pins.
*
* Adds the M150 command to set the LED (or LED strip) color.
* If pins are PWM capable (e.g., 4, 5, 6, 11) then a range of
* luminance values can be set from 0 to 255.
* For NeoPixel LED an overall brightness parameter is also available.
*
* === CAUTION ===
* LED Strips require a MOSFET Chip between PWM lines and LEDs,
* as the Arduino cannot handle the current the LEDs will require.
* Failure to follow this precaution can destroy your Arduino!
*
* NOTE: A separate 5V power supply is required! The NeoPixel LED needs
* more current than the Arduino 5V linear regulator can produce.
*
* Requires PWM frequency between 50 <> 100Hz (Check HAL or variant)
* Use FAST_PWM_FAN, if possible, to reduce fan noise.
*/
// LED Type. Enable only one of the following two options:
//#define RGB_LED
//#define RGBW_LED
#if ANY(RGB_LED, RGBW_LED)
//#define RGB_LED_R_PIN 34
//#define RGB_LED_G_PIN 43
//#define RGB_LED_B_PIN 35
//#define RGB_LED_W_PIN -1
#endif
#if ANY(RGB_LED, RGBW_LED, PCA9632)
//#define RGB_STARTUP_TEST // For PWM pins, fade between all colors
#if ENABLED(RGB_STARTUP_TEST)
#define RGB_STARTUP_TEST_INNER_MS 10 // (ms) Reduce or increase fading speed
#endif
#endif
// Support for Adafruit NeoPixel LED driver
//#define NEOPIXEL_LED
#if ENABLED(NEOPIXEL_LED)
#define NEOPIXEL_TYPE NEO_GRBW // NEO_GRBW, NEO_RGBW, NEO_GRB, NEO_RBG, etc.
// See https://github.com/adafruit/Adafruit_NeoPixel/blob/master/Adafruit_NeoPixel.h
//#define NEOPIXEL_PIN 4 // LED driving pin
//#define NEOPIXEL2_TYPE NEOPIXEL_TYPE
//#define NEOPIXEL2_PIN 5
#define NEOPIXEL_PIXELS 30 // Number of LEDs in the strip. (Longest strip when NEOPIXEL2_SEPARATE is disabled.)
#define NEOPIXEL_IS_SEQUENTIAL // Sequential display for temperature change - LED by LED. Disable to change all LEDs at once.
#define NEOPIXEL_BRIGHTNESS 127 // Initial brightness (0-255)
//#define NEOPIXEL_STARTUP_TEST // Cycle through colors at startup
// Support for second Adafruit NeoPixel LED driver controlled with M150 S1 ...
//#define NEOPIXEL2_SEPARATE
#if ENABLED(NEOPIXEL2_SEPARATE)
#define NEOPIXEL2_PIXELS 15 // Number of LEDs in the second strip
#define NEOPIXEL2_BRIGHTNESS 127 // Initial brightness (0-255)
#define NEOPIXEL2_STARTUP_TEST // Cycle through colors at startup
#define NEOPIXEL_M150_DEFAULT -1 // Default strip for M150 without 'S'. Use -1 to set all by default.
#else
//#define NEOPIXEL2_INSERIES // Default behavior is NeoPixel 2 in parallel
#endif
// Use some of the NeoPixel LEDs for static (background) lighting
//#define NEOPIXEL_BKGD_INDEX_FIRST 0 // Index of the first background LED
//#define NEOPIXEL_BKGD_INDEX_LAST 5 // Index of the last background LED
//#define NEOPIXEL_BKGD_COLOR { 255, 255, 255, 0 } // R, G, B, W
//#define NEOPIXEL_BKGD_TIMEOUT_COLOR { 25, 25, 25, 0 } // R, G, B, W
//#define NEOPIXEL_BKGD_ALWAYS_ON // Keep the backlight on when other NeoPixels are off
#endif
/**
* Printer Event LEDs
*
* During printing, the LEDs will reflect the printer status:
*
* - Gradually change from blue to violet as the heated bed gets to target temp
* - Gradually change from violet to red as the hotend gets to temperature
* - Change to white to illuminate work surface
* - Change to green once print has finished
* - Turn off after the print has finished and the user has pushed a button
*/
#if ANY(BLINKM, RGB_LED, RGBW_LED, PCA9632, PCA9533, NEOPIXEL_LED)
#define PRINTER_EVENT_LEDS
#endif
// @section servos
/**
* Number of servos
*
* For some servo-related options NUM_SERVOS will be set automatically.
* Set this manually if there are extra servos needing manual control.
* Set to 0 to turn off servo support.
*/
//#define NUM_SERVOS 3 // Note: Servo index starts with 0 for M280-M282 commands
// (ms) Delay before the next move will start, to give the servo time to reach its target angle.
// 300ms is a good value but you can try less delay.
// If the servo can't reach the requested position, increase it.
#define SERVO_DELAY { 300 }
// Only power servos during movement, otherwise leave off to prevent jitter
//#define DEACTIVATE_SERVOS_AFTER_MOVE
// Edit servo angles with M281 and save to EEPROM with M500
//#define EDITABLE_SERVO_ANGLES
// Disable servo with M282 to reduce power consumption, noise, and heat when not in use
//#define SERVO_DETACH_GCODE
Configuration_adv.h
/**
* Marlin 3D Printer Firmware
* Copyright (c) 2020 MarlinFirmware [https://github.com/MarlinFirmware/Marlin]
*
* Based on Sprinter and grbl.
* Copyright (c) 2011 Camiel Gubbels / Erik van der Zalm
*
* This program is free software: you can redistribute it and/or modify
* it under the terms of the GNU General Public License as published by
* the Free Software Foundation, either version 3 of the License, or
* (at your option) any later version.
*
* This program is distributed in the hope that it will be useful,
* but WITHOUT ANY WARRANTY; without even the implied warranty of
* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
* GNU General Public License for more details.
*
* You should have received a copy of the GNU General Public License
* along with this program. If not, see <https://www.gnu.org/licenses/>.
*
*/
#pragma once
/**
* Configuration_adv.h
*
* Advanced settings.
* Only change these if you know exactly what you're doing.
* Some of these settings can damage your printer if improperly set!
*
* Basic settings can be found in Configuration.h
*/
#define CONFIGURATION_ADV_H_VERSION 02010300
// @section develop
/**
* Configuration Export
*
* Export the configuration as part of the build. (See signature.py)
* Output files are saved with the build (e.g., .pio/build/mega2560).
*
* See `build_all_examples --ini` as an example of config.ini archiving.
*
* 1 = marlin_config.json - Dictionary containing the configuration.
* This file is also generated for CONFIGURATION_EMBEDDING.
* 2 = config.ini - File format for PlatformIO preprocessing.
* 3 = schema.json - The entire configuration schema. (13 = pattern groups)
* 4 = schema.yml - The entire configuration schema.
*/
//#define CONFIG_EXPORT 2 // :[1:'JSON', 2:'config.ini', 3:'schema.json', 4:'schema.yml']
//===========================================================================
//============================= Thermal Settings ============================
//===========================================================================
// @section temperature
/**
* Thermocouple sensors are quite sensitive to noise. Any noise induced in
* the sensor wires, such as by stepper motor wires run in parallel to them,
* may result in the thermocouple sensor reporting spurious errors. This
* value is the number of errors which can occur in a row before the error
* is reported. This allows us to ignore intermittent error conditions while
* still detecting an actual failure, which should result in a continuous
* stream of errors from the sensor.
*
* Set this value to 0 to fail on the first error to occur.
*/
#define THERMOCOUPLE_MAX_ERRORS 15
//
// Custom Thermistor 1000 parameters
//
#if TEMP_SENSOR_0 == 1000
#define HOTEND0_PULLUP_RESISTOR_OHMS 4700 // Pullup resistor
#define HOTEND0_RESISTANCE_25C_OHMS 100000 // Resistance at 25C
#define HOTEND0_BETA 3950 // Beta value
#define HOTEND0_SH_C_COEFF 0 // Steinhart-Hart C coefficient
#endif
#if TEMP_SENSOR_1 == 1000
#define HOTEND1_PULLUP_RESISTOR_OHMS 4700 // Pullup resistor
#define HOTEND1_RESISTANCE_25C_OHMS 100000 // Resistance at 25C
#define HOTEND1_BETA 3950 // Beta value
#define HOTEND1_SH_C_COEFF 0 // Steinhart-Hart C coefficient
#endif
#if TEMP_SENSOR_2 == 1000
#define HOTEND2_PULLUP_RESISTOR_OHMS 4700 // Pullup resistor
#define HOTEND2_RESISTANCE_25C_OHMS 100000 // Resistance at 25C
#define HOTEND2_BETA 3950 // Beta value
#define HOTEND2_SH_C_COEFF 0 // Steinhart-Hart C coefficient
#endif
#if TEMP_SENSOR_3 == 1000
#define HOTEND3_PULLUP_RESISTOR_OHMS 4700 // Pullup resistor
#define HOTEND3_RESISTANCE_25C_OHMS 100000 // Resistance at 25C
#define HOTEND3_BETA 3950 // Beta value
#define HOTEND3_SH_C_COEFF 0 // Steinhart-Hart C coefficient
#endif
#if TEMP_SENSOR_4 == 1000
#define HOTEND4_PULLUP_RESISTOR_OHMS 4700 // Pullup resistor
#define HOTEND4_RESISTANCE_25C_OHMS 100000 // Resistance at 25C
#define HOTEND4_BETA 3950 // Beta value
#define HOTEND4_SH_C_COEFF 0 // Steinhart-Hart C coefficient
#endif
#if TEMP_SENSOR_5 == 1000
#define HOTEND5_PULLUP_RESISTOR_OHMS 4700 // Pullup resistor
#define HOTEND5_RESISTANCE_25C_OHMS 100000 // Resistance at 25C
#define HOTEND5_BETA 3950 // Beta value
#define HOTEND5_SH_C_COEFF 0 // Steinhart-Hart C coefficient
#endif
#if TEMP_SENSOR_6 == 1000
#define HOTEND6_PULLUP_RESISTOR_OHMS 4700 // Pullup resistor
#define HOTEND6_RESISTANCE_25C_OHMS 100000 // Resistance at 25C
#define HOTEND6_BETA 3950 // Beta value
#define HOTEND6_SH_C_COEFF 0 // Steinhart-Hart C coefficient
#endif
#if TEMP_SENSOR_7 == 1000
#define HOTEND7_PULLUP_RESISTOR_OHMS 4700 // Pullup resistor
#define HOTEND7_RESISTANCE_25C_OHMS 100000 // Resistance at 25C
#define HOTEND7_BETA 3950 // Beta value
#define HOTEND7_SH_C_COEFF 0 // Steinhart-Hart C coefficient
#endif
#if TEMP_SENSOR_BED == 1000
#define BED_PULLUP_RESISTOR_OHMS 4700 // Pullup resistor
#define BED_RESISTANCE_25C_OHMS 100000 // Resistance at 25C
#define BED_BETA 3950 // Beta value
#define BED_SH_C_COEFF 0 // Steinhart-Hart C coefficient
#endif
#if TEMP_SENSOR_CHAMBER == 1000
#define CHAMBER_PULLUP_RESISTOR_OHMS 4700 // Pullup resistor
#define CHAMBER_RESISTANCE_25C_OHMS 100000 // Resistance at 25C
#define CHAMBER_BETA 3950 // Beta value
#define CHAMBER_SH_C_COEFF 0 // Steinhart-Hart C coefficient
#endif
#if TEMP_SENSOR_COOLER == 1000
#define COOLER_PULLUP_RESISTOR_OHMS 4700 // Pullup resistor
#define COOLER_RESISTANCE_25C_OHMS 100000 // Resistance at 25C
#define COOLER_BETA 3950 // Beta value
#define COOLER_SH_C_COEFF 0 // Steinhart-Hart C coefficient
#endif
#if TEMP_SENSOR_PROBE == 1000
#define PROBE_PULLUP_RESISTOR_OHMS 4700 // Pullup resistor
#define PROBE_RESISTANCE_25C_OHMS 100000 // Resistance at 25C
#define PROBE_BETA 3950 // Beta value
#define PROBE_SH_C_COEFF 0 // Steinhart-Hart C coefficient
#endif
#if TEMP_SENSOR_BOARD == 1000
#define BOARD_PULLUP_RESISTOR_OHMS 4700 // Pullup resistor
#define BOARD_RESISTANCE_25C_OHMS 100000 // Resistance at 25C
#define BOARD_BETA 3950 // Beta value
#define BOARD_SH_C_COEFF 0 // Steinhart-Hart C coefficient
#endif
#if TEMP_SENSOR_REDUNDANT == 1000
#define REDUNDANT_PULLUP_RESISTOR_OHMS 4700 // Pullup resistor
#define REDUNDANT_RESISTANCE_25C_OHMS 100000 // Resistance at 25C
#define REDUNDANT_BETA 3950 // Beta value
#define REDUNDANT_SH_C_COEFF 0 // Steinhart-Hart C coefficient
#endif
/**
* Thermocouple Options — for MAX6675 (-2), MAX31855 (-3), and MAX31865 (-5).
*/
//#define TEMP_SENSOR_FORCE_HW_SPI // Ignore SCK/MOSI/MISO pins; use CS and the default SPI bus.
//#define MAX31865_SENSOR_WIRES_0 2 // (2-4) Number of wires for the probe connected to a MAX31865 board.
//#define MAX31865_SENSOR_WIRES_1 2
//#define MAX31865_SENSOR_WIRES_2 2
//#define MAX31865_50HZ_FILTER // Use a 50Hz filter instead of the default 60Hz.
//#define MAX31865_USE_READ_ERROR_DETECTION // Treat value spikes (20°C delta in under 1s) as read errors.
//#define MAX31865_USE_AUTO_MODE // Read faster and more often than 1-shot; bias voltage always on; slight effect on RTD temperature.
//#define MAX31865_MIN_SAMPLING_TIME_MSEC 100 // (ms) 1-shot: minimum read interval. Reduces bias voltage effects by leaving sensor unpowered for longer intervals.
//#define MAX31865_IGNORE_INITIAL_FAULTY_READS 10 // Ignore some read faults (keeping the temperature reading) to work around a possible issue (#23439).
//#define MAX31865_WIRE_OHMS_0 0.95f // For 2-wire, set the wire resistances for more accurate readings.
//#define MAX31865_WIRE_OHMS_1 0.0f
//#define MAX31865_WIRE_OHMS_2 0.0f
/**
* Hephestos 2 24V heated bed upgrade kit.
* https://store.bq.com/en/heated-bed-kit-hephestos2
*/
//#define HEPHESTOS2_HEATED_BED_KIT
#if ENABLED(HEPHESTOS2_HEATED_BED_KIT)
#define HEATER_BED_INVERTING true
#endif
//
// Heated Bed Bang-Bang options
//
#if DISABLED(PIDTEMPBED)
#define BED_CHECK_INTERVAL 5000 // (ms) Interval between checks in bang-bang control
#if ENABLED(BED_LIMIT_SWITCHING)
#define BED_HYSTERESIS 2 // (°C) Only set the relevant heater state when ABS(T-target) > BED_HYSTERESIS
#endif
#endif
//
// Heated Chamber options
//
#if DISABLED(PIDTEMPCHAMBER)
#define CHAMBER_CHECK_INTERVAL 5000 // (ms) Interval between checks in bang-bang control
#if ENABLED(CHAMBER_LIMIT_SWITCHING)
#define CHAMBER_HYSTERESIS 2 // (°C) Only set the relevant heater state when ABS(T-target) > CHAMBER_HYSTERESIS
#endif
#endif
#if TEMP_SENSOR_CHAMBER
//#define HEATER_CHAMBER_PIN P2_04 // Required heater on/off pin (example: SKR 1.4 Turbo HE1 plug)
//#define HEATER_CHAMBER_INVERTING false
//#define FAN1_PIN -1 // Remove the fan signal on pin P2_04 (example: SKR 1.4 Turbo HE1 plug)
//#define CHAMBER_FAN // Enable a fan on the chamber
#if ENABLED(CHAMBER_FAN)
//#define CHAMBER_FAN_INDEX 2 // Index of a fan to repurpose as the chamber fan. (Default: first unused fan)
#define CHAMBER_FAN_MODE 2 // Fan control mode: 0=Static; 1=Linear increase when temp is higher than target; 2=V-shaped curve; 3=similar to 1 but fan is always on.
#if CHAMBER_FAN_MODE == 0
#define CHAMBER_FAN_BASE 255 // Chamber fan PWM (0-255)
#elif CHAMBER_FAN_MODE == 1
#define CHAMBER_FAN_BASE 128 // Base chamber fan PWM (0-255); turns on when chamber temperature is above the target
#define CHAMBER_FAN_FACTOR 25 // PWM increase per °C above target
#elif CHAMBER_FAN_MODE == 2
#define CHAMBER_FAN_BASE 128 // Minimum chamber fan PWM (0-255)
#define CHAMBER_FAN_FACTOR 25 // PWM increase per °C difference from target
#elif CHAMBER_FAN_MODE == 3
#define CHAMBER_FAN_BASE 128 // Base chamber fan PWM (0-255)
#define CHAMBER_FAN_FACTOR 25 // PWM increase per °C above target
#endif
#endif
//#define CHAMBER_VENT // Enable a servo-controlled vent on the chamber
#if ENABLED(CHAMBER_VENT)
#define CHAMBER_VENT_SERVO_NR 1 // Index of the vent servo
#define HIGH_EXCESS_HEAT_LIMIT 5 // How much above target temp to consider there is excess heat in the chamber
#define LOW_EXCESS_HEAT_LIMIT 3
#define MIN_COOLING_SLOPE_TIME_CHAMBER_VENT 20
#define MIN_COOLING_SLOPE_DEG_CHAMBER_VENT 1.5
#endif
#endif
//
// Laser Cooler options
//
#if TEMP_SENSOR_COOLER
#define COOLER_MINTEMP 8 // (°C)
#define COOLER_MAXTEMP 26 // (°C)
#define COOLER_DEFAULT_TEMP 16 // (°C)
#define TEMP_COOLER_HYSTERESIS 1 // (°C) Temperature proximity considered "close enough" to the target
#define COOLER_PIN 8 // Laser cooler on/off pin used to control power to the cooling element (e.g., TEC, External chiller via relay)
#define COOLER_INVERTING false
#define TEMP_COOLER_PIN 15 // Laser/Cooler temperature sensor pin. ADC is required.
#define COOLER_FAN // Enable a fan on the cooler, Fan# 0,1,2,3 etc.
#define COOLER_FAN_INDEX 0 // FAN number 0, 1, 2 etc. e.g.
#if ENABLED(COOLER_FAN)
#define COOLER_FAN_BASE 100 // Base Cooler fan PWM (0-255); turns on when Cooler temperature is above the target
#define COOLER_FAN_FACTOR 25 // PWM increase per °C above target
#endif
#endif
//
// Motherboard Sensor options
//
#if TEMP_SENSOR_BOARD
#define THERMAL_PROTECTION_BOARD // Halt the printer if the board sensor leaves the temp range below.
#define BOARD_MINTEMP 8 // (°C)
#define BOARD_MAXTEMP 70 // (°C)
//#define TEMP_BOARD_PIN -1 // Board temp sensor pin override.
#endif
//
// SoC Sensor options
//
#if TEMP_SENSOR_SOC
#define THERMAL_PROTECTION_SOC // Halt the printer if the SoC sensor leaves the temp range below.
#define SOC_MAXTEMP 85 // (°C)
#endif
/**
* Thermal Protection provides additional protection to your printer from damage
* and fire. Marlin always includes safe min and max temperature ranges which
* protect against a broken or disconnected thermistor wire.
*
* The issue: If a thermistor falls out, it will report the much lower
* temperature of the air in the room, and the the firmware will keep
* the heater on.
*
* The solution: Once the temperature reaches the target, start observing.
* If the temperature stays too far below the target (hysteresis) for too
* long (period), the firmware will halt the machine as a safety precaution.
*
* If you get false positives for "Thermal Runaway", increase
* THERMAL_PROTECTION_HYSTERESIS and/or THERMAL_PROTECTION_PERIOD
*/
#if ENABLED(THERMAL_PROTECTION_HOTENDS)
#define THERMAL_PROTECTION_PERIOD 40 // Seconds
#define THERMAL_PROTECTION_HYSTERESIS 4 // Degrees Celsius
//#define ADAPTIVE_FAN_SLOWING // Slow down the part-cooling fan if the temperature drops
#if ENABLED(ADAPTIVE_FAN_SLOWING)
//#define REPORT_ADAPTIVE_FAN_SLOWING // Report fan slowing activity to the console
#if ANY(MPCTEMP, PIDTEMP)
//#define TEMP_TUNING_MAINTAIN_FAN // Don't slow down the fan speed during M303 or M306 T
#endif
#endif
/**
* Whenever an M104, M109, or M303 increases the target temperature, the
* firmware will wait for the WATCH_TEMP_PERIOD to expire. If the temperature
* hasn't increased by WATCH_TEMP_INCREASE degrees, the machine is halted and
* requires a hard reset. This test restarts with any M104/M109/M303, but only
* if the current temperature is far enough below the target for a reliable
* test.
*
* If you get false positives for "Heating failed", increase WATCH_TEMP_PERIOD
* and/or decrease WATCH_TEMP_INCREASE. WATCH_TEMP_INCREASE should not be set
* below 2.
*/
#define WATCH_TEMP_PERIOD 40 // Seconds
#define WATCH_TEMP_INCREASE 2 // Degrees Celsius
#endif
/**
* Thermal Protection parameters for the bed are just as above for hotends.
*/
#if ENABLED(THERMAL_PROTECTION_BED)
#define THERMAL_PROTECTION_BED_PERIOD 20 // Seconds
#define THERMAL_PROTECTION_BED_HYSTERESIS 2 // Degrees Celsius
/**
* As described above, except for the bed (M140/M190/M303).
*/
#define WATCH_BED_TEMP_PERIOD 60 // Seconds
#define WATCH_BED_TEMP_INCREASE 2 // Degrees Celsius
#endif
/**
* Thermal Protection parameters for the heated chamber.
*/
#if ENABLED(THERMAL_PROTECTION_CHAMBER)
#define THERMAL_PROTECTION_CHAMBER_PERIOD 20 // Seconds
#define THERMAL_PROTECTION_CHAMBER_HYSTERESIS 2 // Degrees Celsius
/**
* Heated chamber watch settings (M141/M191).
*/
#define WATCH_CHAMBER_TEMP_PERIOD 60 // Seconds
#define WATCH_CHAMBER_TEMP_INCREASE 2 // Degrees Celsius
#endif
/**
* Thermal Protection parameters for the laser cooler.
*/
#if ENABLED(THERMAL_PROTECTION_COOLER)
#define THERMAL_PROTECTION_COOLER_PERIOD 10 // Seconds
#define THERMAL_PROTECTION_COOLER_HYSTERESIS 3 // Degrees Celsius
/**
* Laser cooling watch settings (M143/M193).
*/
#define WATCH_COOLER_TEMP_PERIOD 60 // Seconds
#define WATCH_COOLER_TEMP_INCREASE 3 // Degrees Celsius
#endif
#if ANY(THERMAL_PROTECTION_HOTENDS, THERMAL_PROTECTION_BED, THERMAL_PROTECTION_CHAMBER, THERMAL_PROTECTION_COOLER)
/**
* Thermal Protection Variance Monitor - EXPERIMENTAL
* Kill the machine on a stuck temperature sensor.
*
* This feature may cause some thermally-stable systems to halt. Be sure to test it thoroughly under
* a variety of conditions. Disable if you get false positives.
*
* This feature ensures that temperature sensors are updating regularly. If sensors die or get "stuck",
* or if Marlin stops reading them, temperatures will remain constant while heaters may still be powered!
* This feature only monitors temperature changes so it should catch any issue, hardware or software.
*
* By default it uses the THERMAL_PROTECTION_*_PERIOD constants (above) for the time window, within which
* at least one temperature change must occur, to indicate that sensor polling is working. If any monitored
* heater's temperature remains totally constant (without even a fractional change) during this period, a
* thermal malfunction error occurs and the printer is halted.
*
* A very stable heater might produce a false positive and halt the printer. In this case, try increasing
* the corresponding THERMAL_PROTECTION_*_PERIOD constant a bit. Keep in mind that uncontrolled heating
* shouldn't be allowed to persist for more than a minute or two.
*
* Be careful to distinguish false positives from real sensor issues before disabling this feature. If the
* heater's temperature appears even slightly higher than expected after restarting, you may have a real
* thermal malfunction. Check the temperature graph in your host for any unusual bumps.
*/
//#define THERMAL_PROTECTION_VARIANCE_MONITOR
#if ENABLED(THERMAL_PROTECTION_VARIANCE_MONITOR)
// Variance detection window to override the THERMAL_PROTECTION...PERIOD settings above.
// Keep in mind that some heaters heat up faster than others.
//#define THERMAL_PROTECTION_VARIANCE_MONITOR_PERIOD 30 // (s) Override all watch periods
#endif
#endif
#if ENABLED(PIDTEMP)
// Add an additional term to the heater power, proportional to the extrusion speed.
// A well-chosen Kc value should add just enough power to melt the increased material volume.
//#define PID_EXTRUSION_SCALING
#if ENABLED(PID_EXTRUSION_SCALING)
#define DEFAULT_Kc (100) // heating power = Kc * e_speed
#define LPQ_MAX_LEN 50
#endif
/**
* Add an additional term to the heater power, proportional to the fan speed.
* A well-chosen Kf value should add just enough power to compensate for power-loss from the cooling fan.
* You can either just add a constant compensation with the DEFAULT_Kf value
* or follow the instruction below to get speed-dependent compensation.
*
* Constant compensation (use only with fan speeds of 0% and 100%)
* ---------------------------------------------------------------------
* A good starting point for the Kf-value comes from the calculation:
* kf = (power_fan * eff_fan) / power_heater * 255
* where eff_fan is between 0.0 and 1.0, based on fan-efficiency and airflow to the nozzle / heater.
*
* Example:
* Heater: 40W, Fan: 0.1A * 24V = 2.4W, eff_fan = 0.8
* Kf = (2.4W * 0.8) / 40W * 255 = 12.24
*
* Fan-speed dependent compensation
* --------------------------------
* 1. To find a good Kf value, set the hotend temperature, wait for it to settle, and enable the fan (100%).
* Make sure PID_FAN_SCALING_LIN_FACTOR is 0 and PID_FAN_SCALING_ALTERNATIVE_DEFINITION is not enabled.
* If you see the temperature drop repeat the test, increasing the Kf value slowly, until the temperature
* drop goes away. If the temperature overshoots after enabling the fan, the Kf value is too big.
* 2. Note the Kf-value for fan-speed at 100%
* 3. Determine a good value for PID_FAN_SCALING_MIN_SPEED, which is around the speed, where the fan starts moving.
* 4. Repeat step 1. and 2. for this fan speed.
* 5. Enable PID_FAN_SCALING_ALTERNATIVE_DEFINITION and enter the two identified Kf-values in
* PID_FAN_SCALING_AT_FULL_SPEED and PID_FAN_SCALING_AT_MIN_SPEED. Enter the minimum speed in PID_FAN_SCALING_MIN_SPEED
*/
//#define PID_FAN_SCALING
#if ENABLED(PID_FAN_SCALING)
//#define PID_FAN_SCALING_ALTERNATIVE_DEFINITION
#if ENABLED(PID_FAN_SCALING_ALTERNATIVE_DEFINITION)
// The alternative definition is used for an easier configuration.
// Just figure out Kf at full speed (255) and PID_FAN_SCALING_MIN_SPEED.
// DEFAULT_Kf and PID_FAN_SCALING_LIN_FACTOR are calculated accordingly.
#define PID_FAN_SCALING_AT_FULL_SPEED 13.0 //=PID_FAN_SCALING_LIN_FACTOR*255+DEFAULT_Kf
#define PID_FAN_SCALING_AT_MIN_SPEED 6.0 //=PID_FAN_SCALING_LIN_FACTOR*PID_FAN_SCALING_MIN_SPEED+DEFAULT_Kf
#define PID_FAN_SCALING_MIN_SPEED 10.0 // Minimum fan speed at which to enable PID_FAN_SCALING
#define DEFAULT_Kf (255.0*PID_FAN_SCALING_AT_MIN_SPEED-PID_FAN_SCALING_AT_FULL_SPEED*PID_FAN_SCALING_MIN_SPEED)/(255.0-PID_FAN_SCALING_MIN_SPEED)
#define PID_FAN_SCALING_LIN_FACTOR (PID_FAN_SCALING_AT_FULL_SPEED-DEFAULT_Kf)/255.0
#else
#define PID_FAN_SCALING_LIN_FACTOR (0) // Power loss due to cooling = Kf * (fan_speed)
#define DEFAULT_Kf 10 // A constant value added to the PID-tuner
#define PID_FAN_SCALING_MIN_SPEED 10 // Minimum fan speed at which to enable PID_FAN_SCALING
#endif
#endif
#endif
/**
* Automatic Temperature Mode
*
* Dynamically adjust the hotend target temperature based on planned E moves.
*
* (Contrast with PID_EXTRUSION_SCALING, which tracks E movement and adjusts PID
* behavior using an additional kC value.)
*
* Autotemp is calculated by (mintemp + factor * mm_per_sec), capped to maxtemp.
*
* Enable Autotemp Mode with M104/M109 F<factor> S<mintemp> B<maxtemp>.
* Disable by sending M104/M109 with no F parameter (or F0 with AUTOTEMP_PROPORTIONAL).
*/
#define AUTOTEMP
#if ENABLED(AUTOTEMP)
#define AUTOTEMP_OLDWEIGHT 0.98 // Factor used to weight previous readings (0.0 < value < 1.0)
#define AUTOTEMP_MIN 210
#define AUTOTEMP_MAX 250
#define AUTOTEMP_FACTOR 0.1f
// Turn on AUTOTEMP on M104/M109 by default using proportions set here
//#define AUTOTEMP_PROPORTIONAL
#if ENABLED(AUTOTEMP_PROPORTIONAL)
#define AUTOTEMP_MIN_P 0 // (°C) Added to the target temperature
#define AUTOTEMP_MAX_P 5 // (°C) Added to the target temperature
#define AUTOTEMP_FACTOR_P 1 // Apply this F parameter by default (overridden by M104/M109 F)
#endif
#endif
// Show Temperature ADC value
// Enable for M105 to include ADC values read from temperature sensors.
//#define SHOW_TEMP_ADC_VALUES
/**
* High Temperature Thermistor Support
*
* Thermistors able to support high temperature tend to have a hard time getting
* good readings at room and lower temperatures. This means TEMP_SENSOR_X_RAW_LO_TEMP
* will probably be caught when the heating element first turns on during the
* preheating process, which will trigger a MINTEMP error as a safety measure
* and force stop everything.
* To circumvent this limitation, we allow for a preheat time (during which,
* MINTEMP error won't be triggered) and add a min_temp buffer to handle
* aberrant readings.
*
* If you want to enable this feature for your hotend thermistor(s)
* uncomment and set values > 0 in the constants below
*/
// The number of consecutive low temperature errors that can occur
// before a MINTEMP error is triggered. (Shouldn't be more than 10.)
//#define MAX_CONSECUTIVE_LOW_TEMPERATURE_ERROR_ALLOWED 0
/**
* The number of milliseconds a hotend will preheat before starting to check
* the temperature. This value should NOT be set to the time it takes the
* hot end to reach the target temperature, but the time it takes to reach
* the minimum temperature your thermistor can read. The lower the better/safer.
* This shouldn't need to be more than 30 seconds (30000)
*/
//#define PREHEAT_TIME_HOTEND_MS 0
//#define PREHEAT_TIME_BED_MS 0
// @section extruder
/**
* Extruder runout prevention.
* If the machine is idle and the temperature over MINTEMP
* then extrude some filament every couple of SECONDS.
*/
//#define EXTRUDER_RUNOUT_PREVENT
#if ENABLED(EXTRUDER_RUNOUT_PREVENT)
#define EXTRUDER_RUNOUT_MINTEMP 190
#define EXTRUDER_RUNOUT_SECONDS 30
#define EXTRUDER_RUNOUT_SPEED 1500 // (mm/min)
#define EXTRUDER_RUNOUT_EXTRUDE 5 // (mm)
#endif
/**
* Hotend Idle Timeout
* Prevent filament in the nozzle from charring and causing a critical jam.
*/
//#define HOTEND_IDLE_TIMEOUT
#if ENABLED(HOTEND_IDLE_TIMEOUT)
#define HOTEND_IDLE_TIMEOUT_SEC (5*60) // (seconds) Time without extruder movement to trigger protection
#define HOTEND_IDLE_MIN_TRIGGER 180 // (°C) Minimum temperature to enable hotend protection
#define HOTEND_IDLE_NOZZLE_TARGET 0 // (°C) Safe temperature for the nozzle after timeout
#define HOTEND_IDLE_BED_TARGET 0 // (°C) Safe temperature for the bed after timeout
#endif
// @section temperature
// Calibration for AD595 / AD8495 sensor to adjust temperature measurements.
// The final temperature is calculated as (measuredTemp * GAIN) + OFFSET.
#define TEMP_SENSOR_AD595_OFFSET 0.0
#define TEMP_SENSOR_AD595_GAIN 1.0
#define TEMP_SENSOR_AD8495_OFFSET 0.0
#define TEMP_SENSOR_AD8495_GAIN 1.0
/**
* Controller Fan
* To cool down the stepper drivers and MOSFETs.
*
* The fan turns on automatically whenever any driver is enabled and turns
* off (or reduces to idle speed) shortly after drivers are turned off.
*/
//#define USE_CONTROLLER_FAN
#if ENABLED(USE_CONTROLLER_FAN)
//#define CONTROLLER_FAN_PIN -1 // Set a custom pin for the controller fan
//#define CONTROLLER_FAN2_PIN -1 // Set a custom pin for second controller fan
//#define CONTROLLER_FAN_USE_Z_ONLY // With this option only the Z axis is considered
//#define CONTROLLER_FAN_IGNORE_Z // Ignore Z stepper. Useful when stepper timeout is disabled.
#define CONTROLLERFAN_SPEED_MIN 0 // (0-255) Minimum speed. (If set below this value the fan is turned off.)
#define CONTROLLERFAN_SPEED_ACTIVE 255 // (0-255) Active speed, used when any motor is enabled
#define CONTROLLERFAN_SPEED_IDLE 0 // (0-255) Idle speed, used when motors are disabled
#define CONTROLLERFAN_IDLE_TIME 60 // (seconds) Extra time to keep the fan running after disabling motors
// Use TEMP_SENSOR_BOARD as a trigger for enabling the controller fan
//#define CONTROLLER_FAN_MIN_BOARD_TEMP 40 // (°C) Turn on the fan if the board reaches this temperature
// Use TEMP_SENSOR_SOC as a trigger for enabling the controller fan
//#define CONTROLLER_FAN_MIN_SOC_TEMP 40 // (°C) Turn on the fan if the SoC reaches this temperature
//#define CONTROLLER_FAN_EDITABLE // Enable M710 configurable settings
#if ENABLED(CONTROLLER_FAN_EDITABLE)
#define CONTROLLER_FAN_MENU // Enable the Controller Fan submenu
#endif
#endif
/**
* Fan Kickstart
* When part cooling or controller fans first start, run at a speed that
* gets it spinning reliably for a short time before setting the requested speed.
* (Does not work on Sanguinololu with FAN_SOFT_PWM.)
*/
//#define FAN_KICKSTART_TIME 100 // (ms)
//#define FAN_KICKSTART_POWER 180 // 64-255
// Some coolers may require a non-zero "off" state.
//#define FAN_OFF_PWM 1
/**
* PWM Fan Scaling
*
* Define the min/max speeds for PWM fans (as set with M106).
*
* With these options the M106 0-255 value range is scaled to a subset
* to ensure that the fan has enough power to spin, or to run lower
* current fans with higher current. (e.g., 5V/12V fans with 12V/24V)
* Value 0 always turns off the fan.
*
* Define one or both of these to override the default 0-255 range.
*/
//#define FAN_MIN_PWM 50
//#define FAN_MAX_PWM 128
/**
* Fan Fast PWM
*
* Combinations of PWM Modes, prescale values and TOP resolutions are used internally
* to produce a frequency as close as possible to the desired frequency.
*
* FAST_PWM_FAN_FREQUENCY
* Set this to your desired frequency.
* For AVR, if left undefined this defaults to F = F_CPU/(2*255*1)
* i.e., F = 31.4kHz on 16MHz micro-controllers or F = 39.2kHz on 20MHz micro-controllers.
* For non AVR, if left undefined this defaults to F = 1Khz.
* This F value is only to protect the hardware from an absence of configuration
* and not to complete it when users are not aware that the frequency must be specifically set to support the target board.
*
* NOTE: Setting very low frequencies (< 10 Hz) may result in unexpected timer behavior.
* Setting very high frequencies can damage your hardware.
*
* USE_OCR2A_AS_TOP [undefined by default]
* Boards that use TIMER2 for PWM have limitations resulting in only a few possible frequencies on TIMER2:
* 16MHz MCUs: [62.5kHz, 31.4kHz (default), 7.8kHz, 3.92kHz, 1.95kHz, 977Hz, 488Hz, 244Hz, 60Hz, 122Hz, 30Hz]
* 20MHz MCUs: [78.1kHz, 39.2kHz (default), 9.77kHz, 4.9kHz, 2.44kHz, 1.22kHz, 610Hz, 305Hz, 153Hz, 76Hz, 38Hz]
* A greater range can be achieved by enabling USE_OCR2A_AS_TOP. But note that this option blocks the use of
* PWM on pin OC2A. Only use this option if you don't need PWM on 0C2A. (Check your schematic.)
* USE_OCR2A_AS_TOP sacrifices duty cycle control resolution to achieve this broader range of frequencies.
*/
//#define FAST_PWM_FAN // Increase the fan PWM frequency. Removes the PWM noise but increases heating in the FET/Arduino
#if ENABLED(FAST_PWM_FAN)
//#define FAST_PWM_FAN_FREQUENCY 31400 // Define here to override the defaults below
//#define USE_OCR2A_AS_TOP
#ifndef FAST_PWM_FAN_FREQUENCY
#ifdef __AVR__
#define FAST_PWM_FAN_FREQUENCY ((F_CPU) / (2 * 255 * 1))
#else
#define FAST_PWM_FAN_FREQUENCY 1000U
#endif
#endif
#endif
/**
* Assign more PWM fans for part cooling, synchronized with Fan 0
*/
//#define REDUNDANT_PART_COOLING_FAN 1 // Index of the first fan to synchronize with Fan 0
#ifdef REDUNDANT_PART_COOLING_FAN
//#define NUM_REDUNDANT_FANS 1 // Number of sequential fans to synchronize with Fan 0
#endif
// @section extruder
/**
* Extruder cooling fans
*
* Extruder auto fans automatically turn on when their extruders'
* temperatures go above EXTRUDER_AUTO_FAN_TEMPERATURE.
*
* Your board's pins file specifies the recommended pins. Override those here
* or set to -1 to disable completely.
*
* Multiple extruders can be assigned to the same pin in which case
* the fan will turn on when any selected extruder is above the threshold.
*/
#define E0_AUTO_FAN_PIN -1
#define E1_AUTO_FAN_PIN -1
#define E2_AUTO_FAN_PIN -1
#define E3_AUTO_FAN_PIN -1
#define E4_AUTO_FAN_PIN -1
#define E5_AUTO_FAN_PIN -1
#define E6_AUTO_FAN_PIN -1
#define E7_AUTO_FAN_PIN -1
#define CHAMBER_AUTO_FAN_PIN -1
#define COOLER_AUTO_FAN_PIN -1
#define EXTRUDER_AUTO_FAN_TEMPERATURE 50
#define EXTRUDER_AUTO_FAN_SPEED 255 // 255 == full speed
#define CHAMBER_AUTO_FAN_TEMPERATURE 30
#define CHAMBER_AUTO_FAN_SPEED 255
#define COOLER_AUTO_FAN_TEMPERATURE 18
#define COOLER_AUTO_FAN_SPEED 255
/**
* Hotend Cooling Fans tachometers
*
* Define one or more tachometer pins to enable fan speed
* monitoring, and reporting of fan speeds with M123.
*
* NOTE: Only works with fans up to 7000 RPM.
*/
//#define FOURWIRES_FANS // Needed with AUTO_FAN when 4-wire PWM fans are installed
//#define E0_FAN_TACHO_PIN -1
//#define E0_FAN_TACHO_PULLUP
//#define E0_FAN_TACHO_PULLDOWN
//#define E1_FAN_TACHO_PIN -1
//#define E1_FAN_TACHO_PULLUP
//#define E1_FAN_TACHO_PULLDOWN
//#define E2_FAN_TACHO_PIN -1
//#define E2_FAN_TACHO_PULLUP
//#define E2_FAN_TACHO_PULLDOWN
//#define E3_FAN_TACHO_PIN -1
//#define E3_FAN_TACHO_PULLUP
//#define E3_FAN_TACHO_PULLDOWN
//#define E4_FAN_TACHO_PIN -1
//#define E4_FAN_TACHO_PULLUP
//#define E4_FAN_TACHO_PULLDOWN
//#define E5_FAN_TACHO_PIN -1
//#define E5_FAN_TACHO_PULLUP
//#define E5_FAN_TACHO_PULLDOWN
//#define E6_FAN_TACHO_PIN -1
//#define E6_FAN_TACHO_PULLUP
//#define E6_FAN_TACHO_PULLDOWN
//#define E7_FAN_TACHO_PIN -1
//#define E7_FAN_TACHO_PULLUP
//#define E7_FAN_TACHO_PULLDOWN
/**
* Part-Cooling Fan Multiplexer
*
* This feature allows you to digitally multiplex the fan output.
* The multiplexer is automatically switched at tool-change.
* Set FANMUX[012]_PINs below for up to 2, 4, or 8 multiplexed fans.
*/
#define FANMUX0_PIN -1
#define FANMUX1_PIN -1
#define FANMUX2_PIN -1
/**
* M355 Case Light on-off / brightness
*/
//#define CASE_LIGHT_ENABLE
#if ENABLED(CASE_LIGHT_ENABLE)
//#define CASE_LIGHT_PIN 4 // Override the default pin if needed
#define INVERT_CASE_LIGHT false // Set true if Case Light is ON when pin is LOW
#define CASE_LIGHT_DEFAULT_ON true // Set default power-up state on
#define CASE_LIGHT_DEFAULT_BRIGHTNESS 105 // Set default power-up brightness (0-255, requires PWM pin)
//#define CASE_LIGHT_NO_BRIGHTNESS // Disable brightness control. Enable for non-PWM lighting.
//#define CASE_LIGHT_MAX_PWM 128 // Limit PWM duty cycle (0-255)
//#define CASE_LIGHT_MENU // Add Case Light options to the LCD menu
#if ENABLED(NEOPIXEL_LED)
//#define CASE_LIGHT_USE_NEOPIXEL // Use NeoPixel LED as case light
#endif
#if ANY(RGB_LED, RGBW_LED)
//#define CASE_LIGHT_USE_RGB_LED // Use RGB / RGBW LED as case light
#endif
#if ANY(CASE_LIGHT_USE_NEOPIXEL, CASE_LIGHT_USE_RGB_LED)
#define CASE_LIGHT_DEFAULT_COLOR { 255, 255, 255, 255 } // { Red, Green, Blue, White }
#endif
#endif
// @section homing
// If you want endstops to stay on (by default) even when not homing
// enable this option. Override at any time with M120, M121.
#define ENDSTOPS_ALWAYS_ON_DEFAULT
// @section extras
//#define Z_LATE_ENABLE // Enable Z the last moment. Needed if your Z driver overheats.
// Employ an external closed loop controller. Override pins here if needed.
//#define EXTERNAL_CLOSED_LOOP_CONTROLLER
#if ENABLED(EXTERNAL_CLOSED_LOOP_CONTROLLER)
//#define CLOSED_LOOP_ENABLE_PIN -1
//#define CLOSED_LOOP_MOVE_COMPLETE_PIN -1
#endif
/**
* Dual X Carriage
*
* This setup has two X carriages that can move independently, each with its own hotend.
* The carriages can be used to print an object with two colors or materials, or in
* "duplication mode" it can print two identical or X-mirrored objects simultaneously.
* The inactive carriage is parked automatically to prevent oozing.
* X1 is the left carriage, X2 the right. They park and home at opposite ends of the X axis.
* By default the X2 stepper is assigned to the first unused E plug on the board.
*
* The following Dual X Carriage modes can be selected with M605 S<mode>:
*
* 0 : (FULL_CONTROL) The slicer has full control over both X-carriages and can achieve optimal travel
* results as long as it supports dual X-carriages. (M605 S0)
*
* 1 : (AUTO_PARK) The firmware automatically parks and unparks the X-carriages on tool-change so
* that additional slicer support is not required. (M605 S1)
*
* 2 : (DUPLICATION) The firmware moves the second X-carriage and extruder in synchronization with
* the first X-carriage and extruder, to print 2 copies of the same object at the same time.
* Set the constant X-offset and temperature differential with M605 S2 X[offs] R[deg] and
* follow with M605 S2 to initiate duplicated movement.
*
* 3 : (MIRRORED) Formbot/Vivedino-inspired mirrored mode in which the second extruder duplicates
* the movement of the first except the second extruder is reversed in the X axis.
* Set the initial X offset and temperature differential with M605 S2 X[offs] R[deg] and
* follow with M605 S3 to initiate mirrored movement.
*/
//#define DUAL_X_CARRIAGE
#if ENABLED(DUAL_X_CARRIAGE)
#define X1_MIN_POS X_MIN_POS // Set to X_MIN_POS
#define X1_MAX_POS X_BED_SIZE // A max coordinate so the X1 carriage can't hit the parked X2 carriage
#define X2_MIN_POS 80 // A min coordinate so the X2 carriage can't hit the parked X1 carriage
#define X2_MAX_POS 353 // The max position of the X2 carriage, typically also the home position
#define X2_HOME_POS X2_MAX_POS // Default X2 home position. Set to X2_MAX_POS.
// NOTE: For Dual X Carriage use M218 T1 Xn to override the X2_HOME_POS.
// This allows recalibration of endstops distance without a rebuild.
// Remember to set the second extruder's X-offset to 0 in your slicer.
// This is the default power-up mode which can be changed later using M605 S<mode>.
#define DEFAULT_DUAL_X_CARRIAGE_MODE DXC_AUTO_PARK_MODE
// Default x offset in duplication mode (typically set to half print bed width)
#define DEFAULT_DUPLICATION_X_OFFSET 100
// Default action to execute following M605 mode change commands. Typically G28X to apply new mode.
//#define EVENT_GCODE_IDEX_AFTER_MODECHANGE "G28X"
#endif
/**
* Multi-Stepper / Multi-Endstop
*
* When X2_DRIVER_TYPE is defined, this indicates that the X and X2 motors work in tandem.
* The following explanations for X also apply to Y and Z multi-stepper setups.
* Endstop offsets may be changed by 'M666 X<offset> Y<offset> Z<offset>' and stored to EEPROM.
*
* - Enable INVERT_X2_VS_X_DIR if the X2 motor requires an opposite DIR signal from X.
*
* - Enable X_DUAL_ENDSTOPS if the second motor has its own endstop, with adjustable offset.
*
* - Extra endstops are included in the output of 'M119'.
*
* - Set X_DUAL_ENDSTOP_ADJUSTMENT to the known error in the X2 endstop.
* Applied to the X2 motor on 'G28' / 'G28 X'.
* Get the offset by homing X and measuring the error.
* Also set with 'M666 X<offset>' and stored to EEPROM with 'M500'.
*
* - Define the extra endstop pins here to override defaults. No auto-assignment.
*/
#if HAS_X2_STEPPER && DISABLED(DUAL_X_CARRIAGE)
//#define INVERT_X2_VS_X_DIR // X2 direction signal is the opposite of X
//#define X_DUAL_ENDSTOPS // X2 has its own endstop
#if ENABLED(X_DUAL_ENDSTOPS)
//#define X2_STOP_PIN X_MAX_PIN // X2 endstop pin override
#define X2_ENDSTOP_ADJUSTMENT 0 // X2 offset relative to X endstop
#endif
#endif
#if HAS_Y2_STEPPER
//#define INVERT_Y2_VS_Y_DIR // Y2 direction signal is the opposite of Y
//#define Y_DUAL_ENDSTOPS // Y2 has its own endstop
#if ENABLED(Y_DUAL_ENDSTOPS)
//#define Y2_STOP_PIN Y_MAX_PIN // Y2 endstop pin override
#define Y2_ENDSTOP_ADJUSTMENT 0 // Y2 offset relative to Y endstop
#endif
#endif
//
// Multi-Z steppers
//
#ifdef Z2_DRIVER_TYPE
//#define INVERT_Z2_VS_Z_DIR // Z2 direction signal is the opposite of Z
//#define Z_MULTI_ENDSTOPS // Other Z axes have their own endstops
#if ENABLED(Z_MULTI_ENDSTOPS)
//#define Z2_STOP_PIN X_MAX_PIN // Z2 endstop pin override
#define Z2_ENDSTOP_ADJUSTMENT 0 // Z2 offset relative to Z endstop
#endif
#ifdef Z3_DRIVER_TYPE
//#define INVERT_Z3_VS_Z_DIR // Z3 direction signal is the opposite of Z
#if ENABLED(Z_MULTI_ENDSTOPS)
//#define Z3_STOP_PIN Y_MAX_PIN // Z3 endstop pin override
#define Z3_ENDSTOP_ADJUSTMENT 0 // Z3 offset relative to Z endstop
#endif
#endif
#ifdef Z4_DRIVER_TYPE
//#define INVERT_Z4_VS_Z_DIR // Z4 direction signal is the opposite of Z
#if ENABLED(Z_MULTI_ENDSTOPS)
//#define Z4_STOP_PIN Z_MAX_PIN // Z4 endstop pin override
#define Z4_ENDSTOP_ADJUSTMENT 0 // Z4 offset relative to Z endstop
#endif
#endif
#endif
// Drive the E axis with two synchronized steppers
//#define E_DUAL_STEPPER_DRIVERS
#if ENABLED(E_DUAL_STEPPER_DRIVERS)
//#define INVERT_E1_VS_E0_DIR // E direction signals are opposites
#endif
// Activate a solenoid on the active extruder with M380. Disable all with M381.
// Define SOL0_PIN, SOL1_PIN, etc., for each extruder that has a solenoid.
//#define EXT_SOLENOID
// @section homing
/**
* Homing Procedure
* Homing (G28) does an indefinite move towards the endstops to establish
* the position of the toolhead relative to the workspace.
*/
//#define SENSORLESS_BACKOFF_MM { 2, 2, 0 } // (linear=mm, rotational=°) Backoff from endstops before sensorless homing
#define HOMING_BUMP_MM { 5, 5, 2 } // (linear=mm, rotational=°) Backoff from endstops after first bump
#define HOMING_BUMP_DIVISOR { 2, 2, 4 } // Re-Bump Speed Divisor (Divides the Homing Feedrate)
//#define HOMING_BACKOFF_POST_MM { 2, 2, 2 } // (linear=mm, rotational=°) Backoff from endstops after homing
//#define XY_COUNTERPART_BACKOFF_MM 0 // (mm) Backoff X after homing Y, and vice-versa
//#define QUICK_HOME // If G28 contains XY do a diagonal move first
//#define HOME_Y_BEFORE_X // If G28 contains XY home Y before X
//#define HOME_Z_FIRST // Home Z first. Requires a real endstop (not a probe).
//#define CODEPENDENT_XY_HOMING // If X/Y can't home without homing Y/X first
// @section bltouch
#if ENABLED(BLTOUCH)
/**
* Either: Use the defaults (recommended) or: For special purposes, use the following DEFINES
* Do not activate settings that the probe might not understand. Clones might misunderstand
* advanced commands.
*
* Note: If the probe is not deploying, do a "Reset" and "Self-Test" and then check the
* wiring of the BROWN, RED and ORANGE wires.
*
* Note: If the trigger signal of your probe is not being recognized, it has been very often
* because the BLACK and WHITE wires needed to be swapped. They are not "interchangeable"
* like they would be with a real switch. So please check the wiring first.
*
* Settings for all BLTouch and clone probes:
*/
// Safety: The probe needs time to recognize the command.
// Minimum command delay (ms). Enable and increase if needed.
#define BLTOUCH_DELAY 500
/**
* Settings for BLTOUCH Classic 1.2, 1.3 or BLTouch Smart 1.0, 2.0, 2.2, 3.0, 3.1, and most clones:
*/
// Feature: Switch into SW mode after a deploy. It makes the output pulse longer. Can be useful
// in special cases, like noisy or filtered input configurations.
//#define BLTOUCH_FORCE_SW_MODE
/**
* Settings for BLTouch Smart 3.0 and 3.1
* Summary:
* - Voltage modes: 5V and OD (open drain - "logic voltage free") output modes
* - High-Speed mode
* - Disable LCD voltage options
*/
/**
* Danger: Don't activate 5V mode unless attached to a 5V-tolerant controller!
* V3.0 or 3.1: Set default mode to 5V mode at Marlin startup.
* If disabled, OD mode is the hard-coded default on 3.0
* On startup, Marlin will compare its EEPROM to this value. If the selected mode
* differs, a mode set EEPROM write will be completed at initialization.
* Use the option below to force an EEPROM write to a V3.1 probe regardless.
*/
//#define BLTOUCH_SET_5V_MODE
// Safety: Enable voltage mode settings in the LCD menu.
//#define BLTOUCH_LCD_VOLTAGE_MENU
/**
* Safety: Activate if connecting a probe with an unknown voltage mode.
* V3.0: Set a probe into mode selected above at Marlin startup. Required for 5V mode on 3.0
* V3.1: Force a probe with unknown mode into selected mode at Marlin startup ( = Probe EEPROM write )
* To preserve the life of the probe, use this once then turn it off and re-flash.
*/
//#define BLTOUCH_FORCE_MODE_SET
/**
* Enable "HIGH SPEED" option for probing.
* Danger: Disable if your probe sometimes fails. Only suitable for stable well-adjusted systems.
* This feature was designed for Deltabots with very fast Z moves; however, higher speed Cartesians
* might be able to use it. If the machine can't raise Z fast enough the BLTouch may go into ALARM.
*
* Set the default state here, change with 'M401 S' or UI, use M500 to save, M502 to reset.
*/
//#define BLTOUCH_HS_MODE true
#ifdef BLTOUCH_HS_MODE
// The probe Z offset (M851 Z) is the height at which the probe triggers.
// This must be large enough to keep the probe pin off the bed and prevent
// it from snagging on the bed clips.
#define BLTOUCH_HS_EXTRA_CLEARANCE 7 // Extra Z Clearance
#endif
#endif // BLTOUCH
// @section calibration
/**
* Z Steppers Auto-Alignment
* Add the G34 command to align multiple Z steppers using a bed probe.
*/
//#define Z_STEPPER_AUTO_ALIGN
#if ENABLED(Z_STEPPER_AUTO_ALIGN)
/**
* Define probe X and Y positions for Z1, Z2 [, Z3 [, Z4]]
* These positions are machine-relative and do not shift with the M206 home offset!
* If not defined, probe limits will be used.
* Override with 'M422 S<index> X<pos> Y<pos>'.
*/
//#define Z_STEPPER_ALIGN_XY { { 10, 190 }, { 100, 10 }, { 190, 190 } }
/**
* Orientation for the automatically-calculated probe positions.
* Override Z stepper align points with 'M422 S<index> X<pos> Y<pos>'
*
* 2 Steppers: (0) (1)
* | | 2 |
* | 1 2 | |
* | | 1 |
*
* 3 Steppers: (0) (1) (2) (3)
* | 3 | 1 | 2 1 | 2 |
* | | 3 | | 3 |
* | 1 2 | 2 | 3 | 1 |
*
* 4 Steppers: (0) (1) (2) (3)
* | 4 3 | 1 4 | 2 1 | 3 2 |
* | | | | |
* | 1 2 | 2 3 | 3 4 | 4 1 |
*/
#ifndef Z_STEPPER_ALIGN_XY
//#define Z_STEPPERS_ORIENTATION 0
#endif
/**
* Z Stepper positions for more rapid convergence in bed alignment.
* Requires 3 or 4 Z steppers.
*
* Define Stepper XY positions for Z1, Z2, Z3... corresponding to the screw
* positions in the bed carriage, with one position per Z stepper in stepper
* driver order.
*/
//#define Z_STEPPER_ALIGN_STEPPER_XY { { 210.7, 102.5 }, { 152.6, 220.0 }, { 94.5, 102.5 } }
#ifndef Z_STEPPER_ALIGN_STEPPER_XY
// Amplification factor. Used to scale the correction step up or down in case
// the stepper (spindle) position is farther out than the test point.
#define Z_STEPPER_ALIGN_AMP 1.0 // Use a value > 1.0 NOTE: This may cause instability!
#endif
// On a 300mm bed a 5% grade would give a misalignment of ~1.5cm
#define G34_MAX_GRADE 5 // (%) Maximum incline that G34 will handle
#define Z_STEPPER_ALIGN_ITERATIONS 5 // Number of iterations to apply during alignment
#define Z_STEPPER_ALIGN_ACC 0.02 // Stop iterating early if the accuracy is better than this
#define RESTORE_LEVELING_AFTER_G34 // Restore leveling after G34 is done?
// After G34, re-home Z (G28 Z) or just calculate it from the last probe heights?
// Re-homing might be more precise in reproducing the actual 'G28 Z' homing height, especially on an uneven bed.
#define HOME_AFTER_G34
#endif
//
// Add the G35 command to read bed corners to help adjust screws. Requires a bed probe.
//
//#define ASSISTED_TRAMMING
#if ENABLED(ASSISTED_TRAMMING)
// Define from 3 to 9 points to probe.
#define TRAMMING_POINT_XY { { 20, 20 }, { 180, 20 }, { 180, 180 }, { 20, 180 } }
// Define position names for probe points.
#define TRAMMING_POINT_NAME_1 "Front-Left"
#define TRAMMING_POINT_NAME_2 "Front-Right"
#define TRAMMING_POINT_NAME_3 "Back-Right"
#define TRAMMING_POINT_NAME_4 "Back-Left"
#define RESTORE_LEVELING_AFTER_G35 // Enable to restore leveling setup after operation
//#define REPORT_TRAMMING_MM // Report Z deviation (mm) for each point relative to the first
//#define ASSISTED_TRAMMING_WIZARD // Add a Tramming Wizard to the LCD menu
//#define ASSISTED_TRAMMING_WAIT_POSITION { X_CENTER, Y_CENTER, 30 } // Move the nozzle out of the way for adjustment
/**
* Screw thread:
* M3: 30 = Clockwise, 31 = Counter-Clockwise
* M4: 40 = Clockwise, 41 = Counter-Clockwise
* M5: 50 = Clockwise, 51 = Counter-Clockwise
*/
#define TRAMMING_SCREW_THREAD 30
#endif
// @section motion control
/**
* Fixed-time-based Motion Control -- EXPERIMENTAL
* Enable/disable and set parameters with G-code M493.
*/
//#define FT_MOTION
#if ENABLED(FT_MOTION)
#define FTM_DEFAULT_MODE ftMotionMode_DISABLED // Default mode of fixed time control. (Enums in ft_types.h)
#define FTM_DEFAULT_DYNFREQ_MODE dynFreqMode_DISABLED // Default mode of dynamic frequency calculation. (Enums in ft_types.h)
#define FTM_SHAPING_DEFAULT_X_FREQ 37.0f // (Hz) Default peak frequency used by input shapers.
#define FTM_SHAPING_DEFAULT_Y_FREQ 37.0f // (Hz) Default peak frequency used by input shapers.
#define FTM_LINEAR_ADV_DEFAULT_ENA false // Default linear advance enable (true) or disable (false).
#define FTM_LINEAR_ADV_DEFAULT_K 0.0f // Default linear advance gain.
#define FTM_SHAPING_ZETA 0.1f // Zeta used by input shapers.
#define FTM_SHAPING_V_TOL 0.05f // Vibration tolerance used by EI input shapers.
/**
* Advanced configuration
*/
#define FTM_BATCH_SIZE 100 // Batch size for trajectory generation;
// half the window size for Ulendo FBS.
#define FTM_FS 1000 // (Hz) Frequency for trajectory generation. (1 / FTM_TS)
#define FTM_TS 0.001f // (s) Time step for trajectory generation. (1 / FTM_FS)
#define FTM_STEPPER_FS 20000 // (Hz) Frequency for stepper I/O update.
#define FTM_MIN_TICKS ((STEPPER_TIMER_RATE) / (FTM_STEPPER_FS)) // Minimum stepper ticks between steps.
#define FTM_MIN_SHAPE_FREQ 10 // Minimum shaping frequency.
#define FTM_ZMAX 100 // Maximum delays for shaping functions (even numbers only!).
// Calculate as:
// 1/2 * (FTM_FS / FTM_MIN_SHAPE_FREQ) for ZV.
// (FTM_FS / FTM_MIN_SHAPE_FREQ) for ZVD, MZV.
// 3/2 * (FTM_FS / FTM_MIN_SHAPE_FREQ) for 2HEI.
// 2 * (FTM_FS / FTM_MIN_SHAPE_FREQ) for 3HEI.
#define FTM_STEPS_PER_UNIT_TIME 20 // Interpolated stepper commands per unit time.
// Calculate as (FTM_STEPPER_FS / FTM_FS).
#define FTM_CTS_COMPARE_VAL 10 // Comparison value used in interpolation algorithm.
// Calculate as (FTM_STEPS_PER_UNIT_TIME / 2).
// These values may be configured to adjust duration of loop().
#define FTM_STEPS_PER_LOOP 60 // Number of stepper commands to generate each loop().
#define FTM_POINTS_PER_LOOP 100 // Number of trajectory points to generate each loop().
// This value may be configured to adjust duration to consume the command buffer.
// Try increasing this value if stepper motion is not smooth.
#define FTM_STEPPERCMD_BUFF_SIZE 1000 // Size of the stepper command buffers.
//#define FT_MOTION_MENU // Provide a MarlinUI menu to set M493 parameters.
#endif
/**
* Input Shaping -- EXPERIMENTAL
*
* Zero Vibration (ZV) Input Shaping for X and/or Y movements.
*
* This option uses a lot of SRAM for the step buffer. The buffer size is
* calculated automatically from SHAPING_FREQ_[XY], DEFAULT_AXIS_STEPS_PER_UNIT,
* DEFAULT_MAX_FEEDRATE and ADAPTIVE_STEP_SMOOTHING. The default calculation can
* be overridden by setting SHAPING_MIN_FREQ and/or SHAPING_MAX_FEEDRATE.
* The higher the frequency and the lower the feedrate, the smaller the buffer.
* If the buffer is too small at runtime, input shaping will have reduced
* effectiveness during high speed movements.
*
* Tune with M593 D<factor> F<frequency>:
*
* D<factor> Set the zeta/damping factor. If axes (X, Y, etc.) are not specified, set for all axes.
* F<frequency> Set the frequency. If axes (X, Y, etc.) are not specified, set for all axes.
* T[map] Input Shaping type, 0:ZV, 1:EI, 2:2H EI (not implemented yet)
* X<1> Set the given parameters only for the X axis.
* Y<1> Set the given parameters only for the Y axis.
*/
#define INPUT_SHAPING_X
#define INPUT_SHAPING_Y
#if ANY(INPUT_SHAPING_X, INPUT_SHAPING_Y)
#if ENABLED(INPUT_SHAPING_X)
#define SHAPING_FREQ_X 20.38 // (Hz) The default dominant resonant frequency on the X axis.
#define SHAPING_ZETA_X 0.15f // Damping ratio of the X axis (range: 0.0 = no damping to 1.0 = critical damping).
#endif
#if ENABLED(INPUT_SHAPING_Y)
#define SHAPING_FREQ_Y 16.97 // (Hz) The default dominant resonant frequency on the Y axis.
#define SHAPING_ZETA_Y 0.15f // Damping ratio of the Y axis (range: 0.0 = no damping to 1.0 = critical damping).
#endif
//#define SHAPING_MIN_FREQ 20 // By default the minimum of the shaping frequencies. Override to affect SRAM usage.
//#define SHAPING_MAX_STEPRATE 10000 // By default the maximum total step rate of the shaped axes. Override to affect SRAM usage.
//#define SHAPING_MENU // Add a menu to the LCD to set shaping parameters.
#endif
// @section motion
#define AXIS_RELATIVE_MODES { false, false, false, false }
// Add a Duplicate option for well-separated conjoined nozzles
//#define MULTI_NOZZLE_DUPLICATION
// By default stepper drivers require an active-HIGH signal but some high-power drivers require an active-LOW signal to step.
#define STEP_STATE_X HIGH
#define STEP_STATE_Y HIGH
#define STEP_STATE_Z HIGH
#define STEP_STATE_I HIGH
#define STEP_STATE_J HIGH
#define STEP_STATE_K HIGH
#define STEP_STATE_U HIGH
#define STEP_STATE_V HIGH
#define STEP_STATE_W HIGH
#define STEP_STATE_E HIGH
/**
* Idle Stepper Shutdown
* Enable DISABLE_IDLE_* to shut down axis steppers after an idle period.
* The default timeout duration can be overridden with M18 and M84. Set to 0 for No Timeout.
*/
#define DEFAULT_STEPPER_TIMEOUT_SEC 120
#define DISABLE_IDLE_X
#define DISABLE_IDLE_Y
#define DISABLE_IDLE_Z // Disable if the nozzle could fall onto your printed part!
//#define DISABLE_IDLE_I
//#define DISABLE_IDLE_J
//#define DISABLE_IDLE_K
//#define DISABLE_IDLE_U
//#define DISABLE_IDLE_V
//#define DISABLE_IDLE_W
#define DISABLE_IDLE_E // Shut down all idle extruders
// Default Minimum Feedrates for printing and travel moves
#define DEFAULT_MINIMUMFEEDRATE 0.0 // (mm/s. °/s for rotational-only moves) Minimum feedrate. Set with M205 S.
#define DEFAULT_MINTRAVELFEEDRATE 0.0 // (mm/s. °/s for rotational-only moves) Minimum travel feedrate. Set with M205 T.
// Minimum time that a segment needs to take as the buffer gets emptied
#define DEFAULT_MINSEGMENTTIME 20000 // (µs) Set with M205 B.
// Slow down the machine if the lookahead buffer is (by default) half full.
// Increase the slowdown divisor for larger buffer sizes.
#define SLOWDOWN
#if ENABLED(SLOWDOWN)
#define SLOWDOWN_DIVISOR 2
#endif
/**
* XY Frequency limit
* Reduce resonance by limiting the frequency of small zigzag infill moves.
* See https://hydraraptor.blogspot.com/2010/12/frequency-limit.html
* Use M201 F<freq> G<min%> to change limits at runtime.
*/
//#define XY_FREQUENCY_LIMIT 10 // (Hz) Maximum frequency of small zigzag infill moves. Set with M201 F<hertz>.
#ifdef XY_FREQUENCY_LIMIT
#define XY_FREQUENCY_MIN_PERCENT 5 // (percent) Minimum FR percentage to apply. Set with M201 G<min%>.
#endif
// Minimum planner junction speed. Sets the default minimum speed the planner plans for at the end
// of the buffer and all stops. This should not be much greater than zero and should only be changed
// if unwanted behavior is observed on a user's machine when running at very slow speeds.
#define MINIMUM_PLANNER_SPEED 0.05 // (mm/s)
//
// Backlash Compensation
// Adds extra movement to axes on direction-changes to account for backlash.
//
//#define BACKLASH_COMPENSATION
#if ENABLED(BACKLASH_COMPENSATION)
// Define values for backlash distance and correction.
// If BACKLASH_GCODE is enabled these values are the defaults.
#define BACKLASH_DISTANCE_MM { 0, 0, 0 } // (linear=mm, rotational=°) One value for each linear axis
#define BACKLASH_CORRECTION 0.0 // 0.0 = no correction; 1.0 = full correction
// Add steps for motor direction changes on CORE kinematics
//#define CORE_BACKLASH
// Set BACKLASH_SMOOTHING_MM to spread backlash correction over multiple segments
// to reduce print artifacts. (Enabling this is costly in memory and computation!)
//#define BACKLASH_SMOOTHING_MM 3 // (mm)
// Add runtime configuration and tuning of backlash values (M425)
//#define BACKLASH_GCODE
#if ENABLED(BACKLASH_GCODE)
// Measure the Z backlash when probing (G29) and set with "M425 Z"
#define MEASURE_BACKLASH_WHEN_PROBING
#if ENABLED(MEASURE_BACKLASH_WHEN_PROBING)
// When measuring, the probe will move up to BACKLASH_MEASUREMENT_LIMIT
// mm away from point of contact in BACKLASH_MEASUREMENT_RESOLUTION
// increments while checking for the contact to be broken.
#define BACKLASH_MEASUREMENT_LIMIT 0.5 // (mm)
#define BACKLASH_MEASUREMENT_RESOLUTION 0.005 // (mm)
#define BACKLASH_MEASUREMENT_FEEDRATE Z_PROBE_FEEDRATE_SLOW // (mm/min)
#endif
#endif
#endif
/**
* Automatic backlash, position, and hotend offset calibration
*
* Enable G425 to run automatic calibration using an electrically-
* conductive cube, bolt, or washer mounted on the bed.
*
* G425 uses the probe to touch the top and sides of the calibration object
* on the bed and measures and/or correct positional offsets, axis backlash
* and hotend offsets.
*
* Note: HOTEND_OFFSET and CALIBRATION_OBJECT_CENTER must be set to within
* ±5mm of true values for G425 to succeed.
*/
//#define CALIBRATION_GCODE
#if ENABLED(CALIBRATION_GCODE)
//#define CALIBRATION_SCRIPT_PRE "M117 Starting Auto-Calibration\nT0\nG28\nG12\nM117 Calibrating..."
//#define CALIBRATION_SCRIPT_POST "M500\nM117 Calibration data saved"
#define CALIBRATION_MEASUREMENT_RESOLUTION 0.01 // mm
#define CALIBRATION_FEEDRATE_SLOW 60 // mm/min
#define CALIBRATION_FEEDRATE_FAST 1200 // mm/min
#define CALIBRATION_FEEDRATE_TRAVEL 3000 // mm/min
// The following parameters refer to the conical section of the nozzle tip.
#define CALIBRATION_NOZZLE_TIP_HEIGHT 1.0 // mm
#define CALIBRATION_NOZZLE_OUTER_DIAMETER 2.0 // mm
// Uncomment to enable reporting (required for "G425 V", but consumes PROGMEM).
//#define CALIBRATION_REPORTING
// The true location and dimension the cube/bolt/washer on the bed.
#define CALIBRATION_OBJECT_CENTER { 264.0, -22.0, -2.0 } // mm
#define CALIBRATION_OBJECT_DIMENSIONS { 10.0, 10.0, 10.0 } // mm
// Comment out any sides which are unreachable by the probe. For best
// auto-calibration results, all sides must be reachable.
#define CALIBRATION_MEASURE_RIGHT
#define CALIBRATION_MEASURE_FRONT
#define CALIBRATION_MEASURE_LEFT
#define CALIBRATION_MEASURE_BACK
//#define CALIBRATION_MEASURE_IMIN
//#define CALIBRATION_MEASURE_IMAX
//#define CALIBRATION_MEASURE_JMIN
//#define CALIBRATION_MEASURE_JMAX
//#define CALIBRATION_MEASURE_KMIN
//#define CALIBRATION_MEASURE_KMAX
//#define CALIBRATION_MEASURE_UMIN
//#define CALIBRATION_MEASURE_UMAX
//#define CALIBRATION_MEASURE_VMIN
//#define CALIBRATION_MEASURE_VMAX
//#define CALIBRATION_MEASURE_WMIN
//#define CALIBRATION_MEASURE_WMAX
// Probing at the exact top center only works if the center is flat. If
// probing on a screw head or hollow washer, probe near the edges.
//#define CALIBRATION_MEASURE_AT_TOP_EDGES
// Define the pin to read during calibration
#ifndef CALIBRATION_PIN
//#define CALIBRATION_PIN -1 // Define here to override the default pin
#define CALIBRATION_PIN_INVERTING false // Set to true to invert the custom pin
//#define CALIBRATION_PIN_PULLDOWN
#define CALIBRATION_PIN_PULLUP
#endif
#endif
/**
* Multi-stepping sends steps in bursts to reduce MCU usage for high step-rates.
* This allows higher feedrates than the MCU could otherwise support.
*/
#define MULTISTEPPING_LIMIT 16 //: [1, 2, 4, 8, 16, 32, 64, 128]
/**
* Adaptive Step Smoothing increases the resolution of multi-axis moves, particularly at step frequencies
* below 1kHz (for AVR) or 10kHz (for ARM), where aliasing between axes in multi-axis moves causes audible
* vibration and surface artifacts. The algorithm adapts to provide the best possible step smoothing at the
* lowest stepping frequencies.
*/
//#define ADAPTIVE_STEP_SMOOTHING
/**
* Custom Microstepping
* Override as-needed for your setup. Up to 3 MS pins are supported.
*/
//#define MICROSTEP1 LOW,LOW,LOW
//#define MICROSTEP2 HIGH,LOW,LOW
//#define MICROSTEP4 LOW,HIGH,LOW
//#define MICROSTEP8 HIGH,HIGH,LOW
//#define MICROSTEP16 LOW,LOW,HIGH
//#define MICROSTEP32 HIGH,LOW,HIGH
// Microstep settings (Requires a board with pins named X_MS1, X_MS2, etc.)
#define MICROSTEP_MODES { 16, 16, 16, 16, 16, 16 } // [1,2,4,8,16]
/**
* @section stepper motor current
*
* Some boards have a means of setting the stepper motor current via firmware.
*
* The power on motor currents are set by:
* PWM_MOTOR_CURRENT - used by MINIRAMBO & ULTIMAIN_2
* known compatible chips: A4982
* DIGIPOT_MOTOR_CURRENT - used by BQ_ZUM_MEGA_3D, RAMBO & SCOOVO_X9H
* known compatible chips: AD5206
* DAC_MOTOR_CURRENT_DEFAULT - used by PRINTRBOARD_REVF & RIGIDBOARD_V2
* known compatible chips: MCP4728
* DIGIPOT_I2C_MOTOR_CURRENTS - used by 5DPRINT, AZTEEG_X3_PRO, AZTEEG_X5_MINI_WIFI, MIGHTYBOARD_REVE
* known compatible chips: MCP4451, MCP4018
*
* Motor currents can also be set by M907 - M910 and by the LCD.
* M907 - applies to all.
* M908 - BQ_ZUM_MEGA_3D, RAMBO, PRINTRBOARD_REVF, RIGIDBOARD_V2 & SCOOVO_X9H
* M909, M910 & LCD - only PRINTRBOARD_REVF & RIGIDBOARD_V2
*/
//#define PWM_MOTOR_CURRENT { 1300, 1300, 1250 } // Values in milliamps
//#define DIGIPOT_MOTOR_CURRENT { 135,135,135,135,135 } // Values 0-255 (RAMBO 135 = ~0.75A, 185 = ~1A)
//#define DAC_MOTOR_CURRENT_DEFAULT { 70, 80, 90, 80 } // Default drive percent - X, Y, Z, E axis
/**
* I2C-based DIGIPOTs (e.g., Azteeg X3 Pro)
*/
//#define DIGIPOT_MCP4018 // Requires https://github.com/felias-fogg/SlowSoftI2CMaster
//#define DIGIPOT_MCP4451
#if ANY(DIGIPOT_MCP4018, DIGIPOT_MCP4451)
#define DIGIPOT_I2C_NUM_CHANNELS 8 // 5DPRINT:4 AZTEEG_X3_PRO:8 MKS_SBASE:5 MIGHTYBOARD_REVE:5
// Actual motor currents in Amps. The number of entries must match DIGIPOT_I2C_NUM_CHANNELS.
// These correspond to the physical drivers, so be mindful if the order is changed.
#define DIGIPOT_I2C_MOTOR_CURRENTS { 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0 } // AZTEEG_X3_PRO
//#define DIGIPOT_USE_RAW_VALUES // Use DIGIPOT_MOTOR_CURRENT raw wiper values (instead of A4988 motor currents)
/**
* Common slave addresses:
*
* A (A shifted) B (B shifted) IC
* Smoothie 0x2C (0x58) 0x2D (0x5A) MCP4451
* AZTEEG_X3_PRO 0x2C (0x58) 0x2E (0x5C) MCP4451
* AZTEEG_X5_MINI 0x2C (0x58) 0x2E (0x5C) MCP4451
* AZTEEG_X5_MINI_WIFI 0x58 0x5C MCP4451
* MIGHTYBOARD_REVE 0x2F (0x5E) MCP4018
*/
//#define DIGIPOT_I2C_ADDRESS_A 0x2C // Unshifted slave address for first DIGIPOT
//#define DIGIPOT_I2C_ADDRESS_B 0x2D // Unshifted slave address for second DIGIPOT
#endif
//===========================================================================
//=============================Additional Features===========================
//===========================================================================
// @section lcd
#if HAS_MANUAL_MOVE_MENU
#define MANUAL_FEEDRATE { 50*60, 50*60, 4*60, 2*60 } // (mm/min) Feedrates for manual moves along X, Y, Z, E from panel
#define FINE_MANUAL_MOVE 0.025 // (mm) Smallest manual move (< 0.1mm) applying to Z on most machines
#if IS_ULTIPANEL
#define MANUAL_E_MOVES_RELATIVE // Display extruder move distance rather than "position"
#define ULTIPANEL_FEEDMULTIPLY // Encoder sets the feedrate multiplier on the Status Screen
#endif
#endif
// Change values more rapidly when the encoder is rotated faster
#define ENCODER_RATE_MULTIPLIER
#if ENABLED(ENCODER_RATE_MULTIPLIER)
#define ENCODER_10X_STEPS_PER_SEC 30 // (steps/s) Encoder rate for 10x speed
#define ENCODER_100X_STEPS_PER_SEC 80 // (steps/s) Encoder rate for 100x speed
#endif
// Play a beep when the feedrate is changed from the Status Screen
//#define BEEP_ON_FEEDRATE_CHANGE
#if ENABLED(BEEP_ON_FEEDRATE_CHANGE)
#define FEEDRATE_CHANGE_BEEP_DURATION 10
#define FEEDRATE_CHANGE_BEEP_FREQUENCY 440
#endif
//
// LCD Backlight Timeout
//
//#define LCD_BACKLIGHT_TIMEOUT_MINS 1 // (minutes) Timeout before turning off the backlight
#if HAS_BED_PROBE && ANY(HAS_MARLINUI_MENU, HAS_TFT_LVGL_UI)
//#define PROBE_OFFSET_WIZARD // Add a Probe Z Offset calibration option to the LCD menu
#if ENABLED(PROBE_OFFSET_WIZARD)
/**
* Enable to init the Probe Z-Offset when starting the Wizard.
* Use a height slightly above the estimated nozzle-to-probe Z offset.
* For example, with an offset of -5, consider a starting height of -4.
*/
//#define PROBE_OFFSET_WIZARD_START_Z -4.0
// Set a convenient position to do the calibration (probing point and nozzle/bed-distance)
//#define PROBE_OFFSET_WIZARD_XY_POS { X_CENTER, Y_CENTER }
#endif
#endif
#if HAS_MARLINUI_MENU
#if HAS_BED_PROBE
// Add calibration in the Probe Offsets menu to compensate for X-axis twist.
//#define X_AXIS_TWIST_COMPENSATION
#if ENABLED(X_AXIS_TWIST_COMPENSATION)
/**
* Enable to init the Probe Z-Offset when starting the Wizard.
* Use a height slightly above the estimated nozzle-to-probe Z offset.
* For example, with an offset of -5, consider a starting height of -4.
*/
#define XATC_START_Z 0.0
#define XATC_MAX_POINTS 3 // Number of points to probe in the wizard
#define XATC_Y_POSITION Y_CENTER // (mm) Y position to probe
#define XATC_Z_OFFSETS { 0, 0, 0 } // Z offsets for X axis sample points
#endif
// Show Deploy / Stow Probe options in the Motion menu.
#define PROBE_DEPLOY_STOW_MENU
#endif
// Include a page of printer information in the LCD Main Menu
//#define LCD_INFO_MENU
#if ENABLED(LCD_INFO_MENU)
//#define LCD_PRINTER_INFO_IS_BOOTSCREEN // Show bootscreen(s) instead of Printer Info pages
#endif
// Add 50/100mm moves to MarlinUI even with a smaller bed
//#define LARGE_MOVE_ITEMS
// BACK menu items keep the highlight at the top
//#define TURBO_BACK_MENU_ITEM
// Insert a menu for preheating at the top level to allow for quick access
//#define PREHEAT_SHORTCUT_MENU_ITEM
// Add Configuration > Debug Menu > Endstop Test for endstop/probe/runout testing
//#define LCD_ENDSTOP_TEST
#endif // HAS_MARLINUI_MENU
#if HAS_DISPLAY
/**
* *** VENDORS PLEASE READ ***
*
* Marlin allows you to add a custom boot image for Graphical LCDs.
* With this option Marlin will first show your custom screen followed
* by the standard Marlin logo with version number and web URL.
*
* We encourage you to take advantage of this new feature and we also
* respectfully request that you retain the unmodified Marlin boot screen.
*/
#define SHOW_BOOTSCREEN // Show the Marlin bootscreen on startup. ** ENABLE FOR PRODUCTION **
#if ENABLED(SHOW_BOOTSCREEN)
#define BOOTSCREEN_TIMEOUT 3000 // (ms) Total Duration to display the boot screen(s)
#if ANY(HAS_MARLINUI_U8GLIB, TFT_COLOR_UI)
#define BOOT_MARLIN_LOGO_SMALL // Show a smaller Marlin logo on the Boot Screen (saving lots of flash)
#endif
#if HAS_MARLINUI_U8GLIB
//#define BOOT_MARLIN_LOGO_ANIMATED // Animated Marlin logo. Costs ~3260 (or ~940) bytes of flash.
#endif
#if ANY(HAS_MARLINUI_U8GLIB, TOUCH_UI_FTDI_EVE)
//#define SHOW_CUSTOM_BOOTSCREEN // Show the bitmap in Marlin/_Bootscreen.h on startup.
#endif
#endif
#if HAS_MARLINUI_U8GLIB
//#define CUSTOM_STATUS_SCREEN_IMAGE // Show the bitmap in Marlin/_Statusscreen.h on the status screen.
#endif
//#define SOUND_MENU_ITEM // Add a mute option to the LCD menu
//#define SOUND_ON_DEFAULT // Buzzer/speaker default enabled state
// The timeout to return to the status screen from sub-menus
//#define LCD_TIMEOUT_TO_STATUS 15000 // (ms)
// Scroll a longer status message into view
//#define STATUS_MESSAGE_SCROLLING
// Apply a timeout to low-priority status messages
//#define STATUS_MESSAGE_TIMEOUT_SEC 30 // (seconds)
// On the Info Screen, display XY with one decimal place when possible
//#define LCD_DECIMAL_SMALL_XY
// Show the E position (filament used) during printing
//#define LCD_SHOW_E_TOTAL
// Display a negative temperature instead of "err"
//#define SHOW_TEMPERATURE_BELOW_ZERO
/**
* LED Control Menu
* Add LED Control to the LCD menu
*/
//#define LED_CONTROL_MENU
#if ENABLED(LED_CONTROL_MENU)
#define LED_COLOR_PRESETS // Enable the Preset Color menu option
//#define NEO2_COLOR_PRESETS // Enable a second NeoPixel Preset Color menu option
#if ENABLED(LED_COLOR_PRESETS)
#define LED_USER_PRESET_RED 255 // User defined RED value
#define LED_USER_PRESET_GREEN 128 // User defined GREEN value
#define LED_USER_PRESET_BLUE 0 // User defined BLUE value
#define LED_USER_PRESET_WHITE 255 // User defined WHITE value
#define LED_USER_PRESET_BRIGHTNESS 255 // User defined intensity
//#define LED_USER_PRESET_STARTUP // Have the printer display the user preset color on startup
#endif
#if ENABLED(NEO2_COLOR_PRESETS)
#define NEO2_USER_PRESET_RED 255 // User defined RED value
#define NEO2_USER_PRESET_GREEN 128 // User defined GREEN value
#define NEO2_USER_PRESET_BLUE 0 // User defined BLUE value
#define NEO2_USER_PRESET_WHITE 255 // User defined WHITE value
#define NEO2_USER_PRESET_BRIGHTNESS 255 // User defined intensity
//#define NEO2_USER_PRESET_STARTUP // Have the printer display the user preset color on startup for the second strip
#endif
#endif
#endif // HAS_DISPLAY
// Add 'M73' to set print job progress, overrides Marlin's built-in estimate
#define SET_PROGRESS_MANUALLY
#if ENABLED(SET_PROGRESS_MANUALLY)
#define SET_PROGRESS_PERCENT // Add 'P' parameter to set percentage done
#define SET_REMAINING_TIME // Add 'R' parameter to set remaining time
//#define SET_INTERACTION_TIME // Add 'C' parameter to set time until next filament change or other user interaction
#define M73_REPORT // Report M73 values to host
#if ALL(M73_REPORT, HAS_MEDIA)
#define M73_REPORT_SD_ONLY // Report only when printing from SD
#endif
#endif
// LCD Print Progress options. Multiple times may be displayed in turn.
#if HAS_DISPLAY && ANY(HAS_MEDIA, SET_PROGRESS_MANUALLY)
#define SHOW_PROGRESS_PERCENT // Show print progress percentage (doesn't affect progress bar)
#define SHOW_ELAPSED_TIME // Display elapsed printing time (prefix 'E')
//#define SHOW_REMAINING_TIME // Display estimated time to completion (prefix 'R')
#if ENABLED(SET_INTERACTION_TIME)
#define SHOW_INTERACTION_TIME // Display time until next user interaction ('C' = filament change)
#endif
//#define PRINT_PROGRESS_SHOW_DECIMALS // Show/report progress with decimal digits, not all UIs support this
#if ANY(HAS_MARLINUI_HD44780, IS_TFTGLCD_PANEL)
//#define LCD_PROGRESS_BAR // Show a progress bar on HD44780 LCDs for SD printing
#if ENABLED(LCD_PROGRESS_BAR)
#define PROGRESS_BAR_BAR_TIME 2000 // (ms) Amount of time to show the bar
#define PROGRESS_BAR_MSG_TIME 3000 // (ms) Amount of time to show the status message
#define PROGRESS_MSG_EXPIRE 0 // (ms) Amount of time to retain the status message (0=forever)
//#define PROGRESS_MSG_ONCE // Show the message for MSG_TIME then clear it
//#define LCD_PROGRESS_BAR_TEST // Add a menu item to test the progress bar
#endif
#endif
#endif
#if HAS_MEDIA
/**
* SD Card SPI Speed
* May be required to resolve "volume init" errors.
*
* Enable and set to SPI_HALF_SPEED, SPI_QUARTER_SPEED, or SPI_EIGHTH_SPEED
* otherwise full speed will be applied.
*
* :['SPI_HALF_SPEED', 'SPI_QUARTER_SPEED', 'SPI_EIGHTH_SPEED']
*/
//#define SD_SPI_SPEED SPI_HALF_SPEED
// The standard SD detect circuit reads LOW when media is inserted and HIGH when empty.
// Enable this option and set to HIGH if your SD cards are incorrectly detected.
//#define SD_DETECT_STATE HIGH
//#define SD_IGNORE_AT_STARTUP // Don't mount the SD card when starting up
//#define SDCARD_READONLY // Read-only SD card (to save over 2K of flash)
//#define GCODE_REPEAT_MARKERS // Enable G-code M808 to set repeat markers and do looping
#define SD_PROCEDURE_DEPTH 1 // Increase if you need more nested M32 calls
#define SD_FINISHED_STEPPERRELEASE true // Disable steppers when SD Print is finished
#define SD_FINISHED_RELEASECOMMAND "M84" // Use "M84XYE" to keep Z enabled so your bed stays in place
// Reverse SD sort to show "more recent" files first, according to the card's FAT.
// Since the FAT gets out of order with usage, SDCARD_SORT_ALPHA is recommended.
#define SDCARD_RATHERRECENTFIRST
#define SD_MENU_CONFIRM_START // Confirm the selected SD file before printing
//#define NO_SD_AUTOSTART // Remove auto#.g file support completely to save some Flash, SRAM
//#define MENU_ADDAUTOSTART // Add a menu option to run auto#.g files
//#define ONE_CLICK_PRINT // Prompt to print the newest file on inserted media
//#define BROWSE_MEDIA_ON_INSERT // Open the file browser when media is inserted
//#define MEDIA_MENU_AT_TOP // Force the media menu to be listed on the top of the main menu
#define EVENT_GCODE_SD_ABORT "G28XY" // G-code to run on SD Abort Print (e.g., "G28XY" or "G27")
#if ENABLED(PRINTER_EVENT_LEDS)
#define PE_LEDS_COMPLETED_TIME (30*60) // (seconds) Time to keep the LED "done" color before restoring normal illumination
#endif
/**
* Continue after Power-Loss (Creality3D)
*
* Store the current state to the SD Card at the start of each layer
* during SD printing. If the recovery file is found at boot time, present
* an option on the LCD screen to continue the print from the last-known
* point in the file.
*/
//#define POWER_LOSS_RECOVERY
#if ENABLED(POWER_LOSS_RECOVERY)
#define PLR_ENABLED_DEFAULT false // Power Loss Recovery enabled by default. (Set with 'M413 Sn' & M500)
//#define BACKUP_POWER_SUPPLY // Backup power / UPS to move the steppers on power loss
//#define POWER_LOSS_ZRAISE 2 // (mm) Z axis raise on resume (on power loss with UPS)
//#define POWER_LOSS_PIN 44 // Pin to detect power loss. Set to -1 to disable default pin on boards without module.
//#define POWER_LOSS_STATE HIGH // State of pin indicating power loss
//#define POWER_LOSS_PULLUP // Set pullup / pulldown as appropriate for your sensor
//#define POWER_LOSS_PULLDOWN
//#define POWER_LOSS_PURGE_LEN 20 // (mm) Length of filament to purge on resume
//#define POWER_LOSS_RETRACT_LEN 10 // (mm) Length of filament to retract on fail. Requires backup power.
// Without a POWER_LOSS_PIN the following option helps reduce wear on the SD card,
// especially with "vase mode" printing. Set too high and vases cannot be continued.
#define POWER_LOSS_MIN_Z_CHANGE 0.05 // (mm) Minimum Z change before saving power-loss data
// Enable if Z homing is needed for proper recovery. 99.9% of the time this should be disabled!
//#define POWER_LOSS_RECOVER_ZHOME
#if ENABLED(POWER_LOSS_RECOVER_ZHOME)
//#define POWER_LOSS_ZHOME_POS { 0, 0 } // Safe XY position to home Z while avoiding objects on the bed
#endif
#endif
/**
* Sort SD file listings in alphabetical order.
*
* With this option enabled, items on SD cards will be sorted
* by name for easier navigation.
*
* By default...
*
* - Use the slowest -but safest- method for sorting.
* - Folders are sorted to the top.
* - The sort key is statically allocated.
* - No added G-code (M34) support.
* - 40 item sorting limit. (Items after the first 40 are unsorted.)
*
* SD sorting uses static allocation (as set by SDSORT_LIMIT), allowing the
* compiler to calculate the worst-case usage and throw an error if the SRAM
* limit is exceeded.
*
* - SDSORT_USES_RAM provides faster sorting via a static directory buffer.
* - SDSORT_USES_STACK does the same, but uses a local stack-based buffer.
* - SDSORT_CACHE_NAMES will retain the sorted file listing in RAM. (Expensive!)
* - SDSORT_DYNAMIC_RAM only uses RAM when the SD menu is visible. (Use with caution!)
*/
//#define SDCARD_SORT_ALPHA
// SD Card Sorting options
#if ENABLED(SDCARD_SORT_ALPHA)
#define SDSORT_LIMIT 40 // Maximum number of sorted items (10-256). Costs 27 bytes each.
#define FOLDER_SORTING -1 // -1=above 0=none 1=below
#define SDSORT_GCODE false // Allow turning sorting on/off with LCD and M34 G-code.
#define SDSORT_USES_RAM false // Pre-allocate a static array for faster pre-sorting.
#define SDSORT_USES_STACK false // Prefer the stack for pre-sorting to give back some SRAM. (Negated by next 2 options.)
#define SDSORT_CACHE_NAMES false // Keep sorted items in RAM longer for speedy performance. Most expensive option.
#define SDSORT_DYNAMIC_RAM false // Use dynamic allocation (within SD menus). Least expensive option. Set SDSORT_LIMIT before use!
#define SDSORT_CACHE_VFATS 2 // Maximum number of 13-byte VFAT entries to use for sorting.
// Note: Only affects SCROLL_LONG_FILENAMES with SDSORT_CACHE_NAMES but not SDSORT_DYNAMIC_RAM.
#endif
// Allow international symbols in long filenames. To display correctly, the
// LCD's font must contain the characters. Check your selected LCD language.
//#define UTF_FILENAME_SUPPORT
#define LONG_FILENAME_HOST_SUPPORT // Get the long filename of a file/folder with 'M33 <dosname>' and list long filenames with 'M20 L'
//#define LONG_FILENAME_WRITE_SUPPORT // Create / delete files with long filenames via M28, M30, and Binary Transfer Protocol
//#define M20_TIMESTAMP_SUPPORT // Include timestamps by adding the 'T' flag to M20 commands
#define SCROLL_LONG_FILENAMES // Scroll long filenames in the SD card menu
//#define SD_ABORT_NO_COOLDOWN // Leave the heaters on after Stop Print (not recommended!)
/**
* Abort SD printing when any endstop is triggered.
* This feature is enabled with 'M540 S1' or from the LCD menu.
* Endstops must be activated for this option to work.
*/
//#define SD_ABORT_ON_ENDSTOP_HIT
#if ENABLED(SD_ABORT_ON_ENDSTOP_HIT)
//#define SD_ABORT_ON_ENDSTOP_HIT_GCODE "G28XY" // G-code to run on endstop hit (e.g., "G28XY" or "G27")
#endif
//#define SD_REPRINT_LAST_SELECTED_FILE // On print completion open the LCD Menu and select the same file
#define AUTO_REPORT_SD_STATUS // Auto-report media status with 'M27 S<seconds>'
/**
* Support for USB thumb drives using an Arduino USB Host Shield or
* equivalent MAX3421E breakout board. The USB thumb drive will appear
* to Marlin as an SD card.
*
* The MAX3421E can be assigned the same pins as the SD card reader, with
* the following pin mapping:
*
* SCLK, MOSI, MISO --> SCLK, MOSI, MISO
* INT --> SD_DETECT_PIN [1]
* SS --> SDSS
*
* [1] On AVR an interrupt-capable pin is best for UHS3 compatibility.
*/
//#define USB_FLASH_DRIVE_SUPPORT
#if ENABLED(USB_FLASH_DRIVE_SUPPORT)
/**
* USB Host Shield Library
*
* - UHS2 uses no interrupts and has been production-tested
* on a LulzBot TAZ Pro with a 32-bit Archim board.
*
* - UHS3 is newer code with better USB compatibility. But it
* is less tested and is known to interfere with Servos.
* [1] This requires USB_INTR_PIN to be interrupt-capable.
*/
//#define USE_UHS2_USB
//#define USE_UHS3_USB
#define DISABLE_DUE_SD_MMC // Disable USB Host access to USB Drive to prevent hangs on block access for DUE platform
/**
* Native USB Host supported by some boards (USB OTG)
*/
//#define USE_OTG_USB_HOST
#if DISABLED(USE_OTG_USB_HOST)
#define USB_CS_PIN SDSS
#define USB_INTR_PIN SD_DETECT_PIN
#endif
#endif
/**
* When using a bootloader that supports SD-Firmware-Flashing,
* add a menu item to activate SD-FW-Update on the next reboot.
*
* Requires ATMEGA2560 (Arduino Mega)
*
* Tested with this bootloader:
* https://github.com/FleetProbe/MicroBridge-Arduino-ATMega2560
*/
//#define SD_FIRMWARE_UPDATE
#if ENABLED(SD_FIRMWARE_UPDATE)
#define SD_FIRMWARE_UPDATE_EEPROM_ADDR 0x1FF
#define SD_FIRMWARE_UPDATE_ACTIVE_VALUE 0xF0
#define SD_FIRMWARE_UPDATE_INACTIVE_VALUE 0xFF
#endif
/**
* Enable this option if you have more than ~3K of unused flash space.
* Marlin will embed all settings in the firmware binary as compressed data.
* Use 'M503 C' to write the settings out to the SD Card as 'mc.zip'.
* See docs/ConfigEmbedding.md for details on how to use 'mc-apply.py'.
*/
//#define CONFIGURATION_EMBEDDING
// Add an optimized binary file transfer mode, initiated with 'M28 B1'
//#define BINARY_FILE_TRANSFER
#if ENABLED(BINARY_FILE_TRANSFER)
// Include extra facilities (e.g., 'M20 F') supporting firmware upload via BINARY_FILE_TRANSFER
//#define CUSTOM_FIRMWARE_UPLOAD
#endif
/**
* Set this option to one of the following (or the board's defaults apply):
*
* LCD - Use the SD drive in the external LCD controller.
* ONBOARD - Use the SD drive on the control board.
* CUSTOM_CABLE - Use a custom cable to access the SD (as defined in a pins file).
*
* :[ 'LCD', 'ONBOARD', 'CUSTOM_CABLE' ]
*/
#define SDCARD_CONNECTION ONBOARD
// Enable if SD detect is rendered useless (e.g., by using an SD extender)
//#define NO_SD_DETECT
/**
* Multiple volume support - EXPERIMENTAL.
* Adds 'M21 Pm' / 'M21 S' / 'M21 U' to mount SD Card / USB Drive.
*/
//#define MULTI_VOLUME
#if ENABLED(MULTI_VOLUME)
#define VOLUME_SD_ONBOARD
#define VOLUME_USB_FLASH_DRIVE
#define DEFAULT_VOLUME SV_SD_ONBOARD
#define DEFAULT_SHARED_VOLUME SV_USB_FLASH_DRIVE
#endif
#endif // HAS_MEDIA
/**
* By default an onboard SD card reader may be shared as a USB mass-
* storage device. This option hides the SD card from the host PC.
*/
//#define NO_SD_HOST_DRIVE // Disable SD Card access over USB (for security).
/**
* Additional options for Graphical Displays
*
* Use the optimizations here to improve printing performance,
* which can be adversely affected by graphical display drawing,
* especially when doing several short moves, and when printing
* on DELTA and SCARA machines.
*
* Some of these options may result in the display lagging behind
* controller events, as there is a trade-off between reliable
* printing performance versus fast display updates.
*/
#if HAS_MARLINUI_U8GLIB
// Save many cycles by drawing a hollow frame or no frame on the Info Screen
//#define XYZ_NO_FRAME
#define XYZ_HOLLOW_FRAME
// A bigger font is available for edit items. Costs 3120 bytes of flash.
// Western only. Not available for Cyrillic, Kana, Turkish, Greek, or Chinese.
//#define USE_BIG_EDIT_FONT
// A smaller font may be used on the Info Screen. Costs 2434 bytes of flash.
// Western only. Not available for Cyrillic, Kana, Turkish, Greek, or Chinese.
//#define USE_SMALL_INFOFONT
/**
* Graphical Display Sleep
*
* The U8G library provides sleep / wake functions for SH1106, SSD1306,
* SSD1309, and some other DOGM displays.
* Enable this option to save energy and prevent OLED pixel burn-in.
* Adds the menu item Configuration > LCD Timeout (m) to set a wait period
* from 0 (disabled) to 99 minutes.
*/
//#define DISPLAY_SLEEP_MINUTES 2 // (minutes) Timeout before turning off the screen. Set with M255 S.
/**
* ST7920-based LCDs can emulate a 16 x 4 character display using
* the ST7920 character-generator for very fast screen updates.
* Enable LIGHTWEIGHT_UI to use this special display mode.
*
* Since LIGHTWEIGHT_UI has limited space, the position and status
* message occupy the same line. Set STATUS_EXPIRE_SECONDS to the
* length of time to display the status message before clearing.
*
* Set STATUS_EXPIRE_SECONDS to zero to never clear the status.
* This will prevent position updates from being displayed.
*/
#if IS_U8GLIB_ST7920
// Enable this option and reduce the value to optimize screen updates.
// The normal delay is 10µs. Use the lowest value that still gives a reliable display.
//#define DOGM_SPI_DELAY_US 5
//#define LIGHTWEIGHT_UI
#if ENABLED(LIGHTWEIGHT_UI)
#define STATUS_EXPIRE_SECONDS 20
#endif
#endif
/**
* Status (Info) Screen customization
* These options may affect code size and screen render time.
* Custom status screens can forcibly override these settings.
*/
//#define STATUS_COMBINE_HEATERS // Use combined heater images instead of separate ones
//#define STATUS_HOTEND_NUMBERLESS // Use plain hotend icons instead of numbered ones (with 2+ hotends)
#define STATUS_HOTEND_INVERTED // Show solid nozzle bitmaps when heating (Requires STATUS_HOTEND_ANIM for numbered hotends)
#define STATUS_HOTEND_ANIM // Use a second bitmap to indicate hotend heating
#define STATUS_BED_ANIM // Use a second bitmap to indicate bed heating
#define STATUS_CHAMBER_ANIM // Use a second bitmap to indicate chamber heating
//#define STATUS_CUTTER_ANIM // Use a second bitmap to indicate spindle / laser active
//#define STATUS_COOLER_ANIM // Use a second bitmap to indicate laser cooling
//#define STATUS_FLOWMETER_ANIM // Use multiple bitmaps to indicate coolant flow
//#define STATUS_ALT_BED_BITMAP // Use the alternative bed bitmap
//#define STATUS_ALT_FAN_BITMAP // Use the alternative fan bitmap
//#define STATUS_FAN_FRAMES 3 // :[0,1,2,3,4] Number of fan animation frames
//#define STATUS_HEAT_PERCENT // Show heating in a progress bar
// Frivolous Game Options
//#define MARLIN_BRICKOUT
//#define MARLIN_INVADERS
//#define MARLIN_SNAKE
//#define GAMES_EASTER_EGG // Add extra blank lines above the "Games" sub-menu
#endif // HAS_MARLINUI_U8GLIB
#if HAS_MARLINUI_U8GLIB || IS_DWIN_MARLINUI
#define MENU_HOLLOW_FRAME // Enable to save many cycles by drawing a hollow frame on Menu Screens
//#define OVERLAY_GFX_REVERSE // Swap the CW/CCW indicators in the graphics overlay
#endif
//
// Additional options for DGUS / DWIN displays
//
#if HAS_DGUS_LCD
#define LCD_BAUDRATE 115200
#define DGUS_RX_BUFFER_SIZE 128
#define DGUS_TX_BUFFER_SIZE 48
//#define SERIAL_STATS_RX_BUFFER_OVERRUNS // Fix Rx overrun situation (Currently only for AVR)
#define DGUS_UPDATE_INTERVAL_MS 500 // (ms) Interval between automatic screen updates
#if DGUS_UI_IS(FYSETC, MKS, HIPRECY)
#define DGUS_PRINT_FILENAME // Display the filename during printing
#define DGUS_PREHEAT_UI // Display a preheat screen during heatup
#if DGUS_UI_IS(FYSETC, MKS)
//#define DGUS_UI_MOVE_DIS_OPTION // Disabled by default for FYSETC and MKS
#else
#define DGUS_UI_MOVE_DIS_OPTION // Enabled by default for UI_HIPRECY
#endif
#define DGUS_FILAMENT_LOADUNLOAD
#if ENABLED(DGUS_FILAMENT_LOADUNLOAD)
#define DGUS_FILAMENT_PURGE_LENGTH 10
#define DGUS_FILAMENT_LOAD_LENGTH_PER_TIME 0.5 // (mm) Adjust in proportion to DGUS_UPDATE_INTERVAL_MS
#endif
#define DGUS_UI_WAITING // Show a "waiting" screen between some screens
#if ENABLED(DGUS_UI_WAITING)
#define DGUS_UI_WAITING_STATUS 10
#define DGUS_UI_WAITING_STATUS_PERIOD 8 // Increase to slower waiting status looping
#endif
#endif
#endif // HAS_DGUS_LCD
//
// Additional options for AnyCubic Chiron TFT displays
//
#if ENABLED(ANYCUBIC_LCD_CHIRON)
// By default the type of panel is automatically detected.
// Enable one of these options if you know the panel type.
//#define CHIRON_TFT_STANDARD
//#define CHIRON_TFT_NEW
// Enable the longer Anycubic powerup startup tune
//#define AC_DEFAULT_STARTUP_TUNE
/**
* Display Folders
* By default the file browser lists all G-code files (including those in subfolders) in a flat list.
* Enable this option to display a hierarchical file browser.
*
* NOTES:
* - Without this option it helps to enable SDCARD_SORT_ALPHA so files are sorted before/after folders.
* - When used with the "new" panel, folder names will also have '.gcode' appended to their names.
* This hack is currently required to force the panel to show folders.
*/
#define AC_SD_FOLDER_VIEW
#endif
//
// Specify additional languages for the UI. Default specified by LCD_LANGUAGE.
//
#if ANY(DOGLCD, TFT_COLOR_UI, TOUCH_UI_FTDI_EVE, IS_DWIN_MARLINUI, ANYCUBIC_LCD_VYPER)
//#define LCD_LANGUAGE_2 fr
//#define LCD_LANGUAGE_3 de
//#define LCD_LANGUAGE_4 es
//#define LCD_LANGUAGE_5 it
#ifdef LCD_LANGUAGE_2
//#define LCD_LANGUAGE_AUTO_SAVE // Automatically save language to EEPROM on change
#endif
#endif
//
// Touch UI for the FTDI Embedded Video Engine (EVE)
//
#if ENABLED(TOUCH_UI_FTDI_EVE)
// Display board used
//#define LCD_FTDI_VM800B35A // FTDI 3.5" with FT800 (320x240)
//#define LCD_4DSYSTEMS_4DLCD_FT843 // 4D Systems 4.3" (480x272)
//#define LCD_HAOYU_FT800CB // Haoyu with 4.3" or 5" (480x272)
//#define LCD_HAOYU_FT810CB // Haoyu with 5" (800x480)
//#define LCD_LULZBOT_CLCD_UI // LulzBot Color LCD UI
//#define LCD_FYSETC_TFT81050 // FYSETC with 5" (800x480)
//#define LCD_EVE3_50G // Matrix Orbital 5.0", 800x480, BT815
//#define LCD_EVE2_50G // Matrix Orbital 5.0", 800x480, FT813
// Correct the resolution if not using the stock TFT panel.
//#define TOUCH_UI_320x240
//#define TOUCH_UI_480x272
//#define TOUCH_UI_800x480
// Mappings for boards with a standard RepRapDiscount Display connector
//#define AO_EXP1_PINMAP // LulzBot CLCD UI EXP1 mapping
//#define AO_EXP2_PINMAP // LulzBot CLCD UI EXP2 mapping
//#define CR10_TFT_PINMAP // Rudolph Riedel's CR10 pin mapping
//#define S6_TFT_PINMAP // FYSETC S6 pin mapping
//#define F6_TFT_PINMAP // FYSETC F6 pin mapping
//#define OTHER_PIN_LAYOUT // Define pins manually below
#if ENABLED(OTHER_PIN_LAYOUT)
// Pins for CS and MOD_RESET (PD) must be chosen
#define CLCD_MOD_RESET 9
#define CLCD_SPI_CS 10
// If using software SPI, specify pins for SCLK, MOSI, MISO
//#define CLCD_USE_SOFT_SPI
#if ENABLED(CLCD_USE_SOFT_SPI)
#define CLCD_SOFT_SPI_MOSI 11
#define CLCD_SOFT_SPI_MISO 12
#define CLCD_SOFT_SPI_SCLK 13
#endif
#endif
// Display Orientation. An inverted (i.e. upside-down) display
// is supported on the FT800. The FT810 and beyond also support
// portrait and mirrored orientations.
//#define TOUCH_UI_INVERTED
//#define TOUCH_UI_PORTRAIT
//#define TOUCH_UI_MIRRORED
// UTF8 processing and rendering.
// Unsupported characters are shown as '?'.
//#define TOUCH_UI_USE_UTF8
#if ENABLED(TOUCH_UI_USE_UTF8)
// Western accents support. These accented characters use
// combined bitmaps and require relatively little storage.
#define TOUCH_UI_UTF8_WESTERN_CHARSET
#if ENABLED(TOUCH_UI_UTF8_WESTERN_CHARSET)
// Additional character groups. These characters require
// full bitmaps and take up considerable storage:
//#define TOUCH_UI_UTF8_SUPERSCRIPTS // ¹ ² ³
//#define TOUCH_UI_UTF8_COPYRIGHT // © ®
//#define TOUCH_UI_UTF8_GERMANIC // ß
//#define TOUCH_UI_UTF8_SCANDINAVIAN // Æ Ð Ø Þ æ ð ø þ
//#define TOUCH_UI_UTF8_PUNCTUATION // « » ¿ ¡
//#define TOUCH_UI_UTF8_CURRENCY // ¢ £ ¤ ¥
//#define TOUCH_UI_UTF8_ORDINALS // º ª
//#define TOUCH_UI_UTF8_MATHEMATICS // ± × ÷
//#define TOUCH_UI_UTF8_FRACTIONS // ¼ ½ ¾
//#define TOUCH_UI_UTF8_SYMBOLS // µ ¶ ¦ § ¬
#endif
// Cyrillic character set, costs about 27KiB of flash
//#define TOUCH_UI_UTF8_CYRILLIC_CHARSET
#endif
// Use a smaller font when labels don't fit buttons
#define TOUCH_UI_FIT_TEXT
// Use a numeric passcode for "Screen lock" keypad.
// (recommended for smaller displays)
//#define TOUCH_UI_PASSCODE
// Output extra debug info for Touch UI events
//#define TOUCH_UI_DEBUG
// Developer menu (accessed by touching "About Printer" copyright text)
//#define TOUCH_UI_DEVELOPER_MENU
#endif
//
// Classic UI Options
//
#if TFT_SCALED_DOGLCD
//#define TFT_MARLINUI_COLOR 0xFFFF // White
//#define TFT_MARLINBG_COLOR 0x0000 // Black
//#define TFT_DISABLED_COLOR 0x0003 // Almost black
//#define TFT_BTCANCEL_COLOR 0xF800 // Red
//#define TFT_BTARROWS_COLOR 0xDEE6 // 11011 110111 00110 Yellow
//#define TFT_BTOKMENU_COLOR 0x145F // 00010 100010 11111 Cyan
#endif
//
// ADC Button Debounce
//
#if HAS_ADC_BUTTONS
#define ADC_BUTTON_DEBOUNCE_DELAY 16 // Increase if buttons bounce or repeat too fast
#endif
// @section safety
/**
* The watchdog hardware timer will do a reset and disable all outputs
* if the firmware gets too overloaded to read the temperature sensors.
*
* If you find that watchdog reboot causes your AVR board to hang forever,
* enable WATCHDOG_RESET_MANUAL to use a custom timer instead of WDTO.
* NOTE: This method is less reliable as it can only catch hangups while
* interrupts are enabled.
*/
#define USE_WATCHDOG
#if ENABLED(USE_WATCHDOG)
//#define WATCHDOG_RESET_MANUAL
#endif
// @section lcd
/**
* Babystepping enables movement of the axes by tiny increments without changing
* the current position values. This feature is used primarily to adjust the Z
* axis in the first layer of a print in real-time.
*
* Warning: Does not respect endstops!
*/
#define BABYSTEPPING
#if ENABLED(BABYSTEPPING)
//#define INTEGRATED_BABYSTEPPING // Integration of babystepping into the Stepper ISR
//#define EP_BABYSTEPPING // M293/M294 babystepping with EMERGENCY_PARSER support
//#define BABYSTEP_WITHOUT_HOMING
//#define BABYSTEP_ALWAYS_AVAILABLE // Allow babystepping at all times (not just during movement)
//#define BABYSTEP_XY // Also enable X/Y Babystepping. Not supported on DELTA!
//#define BABYSTEP_INVERT_Z // Enable if Z babysteps should go the other way
//#define BABYSTEP_MILLIMETER_UNITS // Specify BABYSTEP_MULTIPLICATOR_(XY|Z) in mm instead of micro-steps
#define BABYSTEP_MULTIPLICATOR_Z 1 // (steps or mm) Steps or millimeter distance for each Z babystep
#define BABYSTEP_MULTIPLICATOR_XY 1 // (steps or mm) Steps or millimeter distance for each XY babystep
//#define DOUBLECLICK_FOR_Z_BABYSTEPPING // Double-click on the Status Screen for Z Babystepping.
#if ENABLED(DOUBLECLICK_FOR_Z_BABYSTEPPING)
#define DOUBLECLICK_MAX_INTERVAL 1250 // Maximum interval between clicks, in milliseconds.
// Note: Extra time may be added to mitigate controller latency.
//#define MOVE_Z_WHEN_IDLE // Jump to the move Z menu on double-click when printer is idle.
#if ENABLED(MOVE_Z_WHEN_IDLE)
#define MOVE_Z_IDLE_MULTIPLICATOR 1 // Multiply 1mm by this factor for the move step size.
#endif
#endif
//#define BABYSTEP_DISPLAY_TOTAL // Display total babysteps since last G28
#define BABYSTEP_ZPROBE_OFFSET // Combine M851 Z and Babystepping
#if ENABLED(BABYSTEP_ZPROBE_OFFSET)
//#define BABYSTEP_HOTEND_Z_OFFSET // For multiple hotends, babystep relative Z offsets
//#define BABYSTEP_GFX_OVERLAY // Enable graphical overlay on Z-offset editor
#endif
#endif
// @section extruder
/**
* Linear Pressure Control v1.5
*
* Assumption: advance [steps] = k * (delta velocity [steps/s])
* K=0 means advance disabled.
*
* NOTE: K values for LIN_ADVANCE 1.5 differ from earlier versions!
*
* Set K around 0.22 for 3mm PLA Direct Drive with ~6.5cm between the drive gear and heatbreak.
* Larger K values will be needed for flexible filament and greater distances.
* If this algorithm produces a higher speed offset than the extruder can handle (compared to E jerk)
* print acceleration will be reduced during the affected moves to keep within the limit.
*
* See https://marlinfw.org/docs/features/lin_advance.html for full instructions.
*/
//#define LIN_ADVANCE
#if ENABLED(LIN_ADVANCE)
#if ENABLED(DISTINCT_E_FACTORS)
#define ADVANCE_K { 0.22 } // (mm) Compression length per 1mm/s extruder speed, per extruder
#else
#define ADVANCE_K 0.22 // (mm) Compression length applying to all extruders
#endif
//#define ADVANCE_K_EXTRA // Add a second linear advance constant, configurable with M900 L.
//#define LA_DEBUG // Print debug information to serial during operation. Disable for production use.
//#define ALLOW_LOW_EJERK // Allow a DEFAULT_EJERK value of <10. Recommended for direct drive hotends.
//#define EXPERIMENTAL_I2S_LA // Allow I2S_STEPPER_STREAM to be used with LA. Performance degrades as the LA step rate reaches ~20kHz.
#endif
// @section leveling
/**
* Use Safe Bed Leveling coordinates to move axes to a useful position before bed probing.
* For example, after homing a rotational axis the Z probe might not be perpendicular to the bed.
* Choose values the orient the bed horizontally and the Z-probe vertically.
*/
//#define SAFE_BED_LEVELING_START_X 0.0
//#define SAFE_BED_LEVELING_START_Y 0.0
//#define SAFE_BED_LEVELING_START_Z 0.0
//#define SAFE_BED_LEVELING_START_I 0.0
//#define SAFE_BED_LEVELING_START_J 0.0
//#define SAFE_BED_LEVELING_START_K 0.0
//#define SAFE_BED_LEVELING_START_U 0.0
//#define SAFE_BED_LEVELING_START_V 0.0
//#define SAFE_BED_LEVELING_START_W 0.0
/**
* Points to probe for all 3-point Leveling procedures.
* Override if the automatically selected points are inadequate.
*/
#if NEEDS_THREE_PROBE_POINTS
//#define PROBE_PT_1 { 15, 180 } // (mm) { x, y }
//#define PROBE_PT_2 { 15, 20 }
//#define PROBE_PT_3 { 170, 20 }
#endif
/**
* Probing Margins
*
* Override PROBING_MARGIN for each side of the build plate
* Useful to get probe points to exact positions on targets or
* to allow leveling to avoid plate clamps on only specific
* sides of the bed. With NOZZLE_AS_PROBE negative values are
* allowed, to permit probing outside the bed.
*
* If you are replacing the prior *_PROBE_BED_POSITION options,
* LEFT and FRONT values in most cases will map directly over
* RIGHT and REAR would be the inverse such as
* (X/Y_BED_SIZE - RIGHT/BACK_PROBE_BED_POSITION)
*
* This will allow all positions to match at compilation, however
* should the probe position be modified with M851XY then the
* probe points will follow. This prevents any change from causing
* the probe to be unable to reach any points.
*/
#if PROBE_SELECTED && !IS_KINEMATIC
//#define PROBING_MARGIN_LEFT PROBING_MARGIN
//#define PROBING_MARGIN_RIGHT PROBING_MARGIN
//#define PROBING_MARGIN_FRONT PROBING_MARGIN
//#define PROBING_MARGIN_BACK PROBING_MARGIN
#endif
#if ANY(MESH_BED_LEVELING, AUTO_BED_LEVELING_UBL)
// Override the mesh area if the automatic (max) area is too large
//#define MESH_MIN_X MESH_INSET
//#define MESH_MIN_Y MESH_INSET
//#define MESH_MAX_X X_BED_SIZE - (MESH_INSET)
//#define MESH_MAX_Y Y_BED_SIZE - (MESH_INSET)
#endif
#if ALL(AUTO_BED_LEVELING_UBL, EEPROM_SETTINGS)
//#define OPTIMIZED_MESH_STORAGE // Store mesh with less precision to save EEPROM space
#endif
/**
* Repeatedly attempt G29 leveling until it succeeds.
* Stop after G29_MAX_RETRIES attempts.
*/
//#define G29_RETRY_AND_RECOVER
#if ENABLED(G29_RETRY_AND_RECOVER)
#define G29_MAX_RETRIES 3
#define G29_HALT_ON_FAILURE
/**
* Specify the GCODE commands that will be executed when leveling succeeds,
* between attempts, and after the maximum number of retries have been tried.
*/
#define G29_SUCCESS_COMMANDS "M117 Bed leveling done."
#define G29_RECOVER_COMMANDS "M117 Probe failed. Rewiping.\nG28\nG12 P0 S12 T0"
#define G29_FAILURE_COMMANDS "M117 Bed leveling failed.\nG0 Z10\nM300 P25 S880\nM300 P50 S0\nM300 P25 S880\nM300 P50 S0\nM300 P25 S880\nM300 P50 S0\nG4 S1"
#endif
/**
* Thermal Probe Compensation
*
* Adjust probe measurements to compensate for distortion associated with the temperature
* of the probe, bed, and/or hotend.
* Use G76 to automatically calibrate this feature for probe and bed temperatures.
* (Extruder temperature/offset values must be calibrated manually.)
* Use M871 to set temperature/offset values manually.
* For more details see https://marlinfw.org/docs/features/probe_temp_compensation.html
*/
//#define PTC_PROBE // Compensate based on probe temperature
//#define PTC_BED // Compensate based on bed temperature
//#define PTC_HOTEND // Compensate based on hotend temperature
#if ANY(PTC_PROBE, PTC_BED, PTC_HOTEND)
/**
* If the probe is outside the defined range, use linear extrapolation with the closest
* point and the point with index PTC_LINEAR_EXTRAPOLATION. e.g., If set to 4 it will use the
* linear extrapolation between data[0] and data[4] for values below PTC_PROBE_START.
*/
//#define PTC_LINEAR_EXTRAPOLATION 4
#if ENABLED(PTC_PROBE)
// Probe temperature calibration generates a table of values starting at PTC_PROBE_START
// (e.g., 30), in steps of PTC_PROBE_RES (e.g., 5) with PTC_PROBE_COUNT (e.g., 10) samples.
#define PTC_PROBE_START 30 // (°C)
#define PTC_PROBE_RES 5 // (°C)
#define PTC_PROBE_COUNT 10
#define PTC_PROBE_ZOFFS { 0 } // (µm) Z adjustments per sample
#endif
#if ENABLED(PTC_BED)
// Bed temperature calibration builds a similar table.
#define PTC_BED_START 60 // (°C)
#define PTC_BED_RES 5 // (°C)
#define PTC_BED_COUNT 10
#define PTC_BED_ZOFFS { 0 } // (µm) Z adjustments per sample
#endif
#if ENABLED(PTC_HOTEND)
// Note: There is no automatic calibration for the hotend. Use M871.
#define PTC_HOTEND_START 180 // (°C)
#define PTC_HOTEND_RES 5 // (°C)
#define PTC_HOTEND_COUNT 20
#define PTC_HOTEND_ZOFFS { 0 } // (µm) Z adjustments per sample
#endif
// G76 options
#if ALL(PTC_PROBE, PTC_BED)
// Park position to wait for probe cooldown
#define PTC_PARK_POS { 0, 0, 100 }
// Probe position to probe and wait for probe to reach target temperature
//#define PTC_PROBE_POS { 12.0f, 7.3f } // Example: MK52 magnetic heatbed
#define PTC_PROBE_POS { 90, 100 }
// The temperature the probe should be at while taking measurements during
// bed temperature calibration.
#define PTC_PROBE_TEMP 30 // (°C)
// Height above Z=0.0 to raise the nozzle. Lowering this can help the probe to heat faster.
// Note: The Z=0.0 offset is determined by the probe Z offset (e.g., as set with M851 Z).
#define PTC_PROBE_HEATING_OFFSET 0.5
#endif
#endif // PTC_PROBE || PTC_BED || PTC_HOTEND
// @section extras
//
// G60/G61 Position Save and Return
//
//#define SAVED_POSITIONS 1 // Each saved position slot costs 12 bytes
//
// G2/G3 Arc Support
//
#define ARC_SUPPORT // Requires ~3226 bytes
#if ENABLED(ARC_SUPPORT)
#define MIN_ARC_SEGMENT_MM 0.1 // (mm) Minimum length of each arc segment
#define MAX_ARC_SEGMENT_MM 1.0 // (mm) Maximum length of each arc segment
#define MIN_CIRCLE_SEGMENTS 72 // Minimum number of segments in a complete circle
//#define ARC_SEGMENTS_PER_SEC 50 // Use the feedrate to choose the segment length
#define N_ARC_CORRECTION 25 // Number of interpolated segments between corrections
//#define ARC_P_CIRCLES // Enable the 'P' parameter to specify complete circles
//#define SF_ARC_FIX // Enable only if using SkeinForge with "Arc Point" fillet procedure
#endif
// G5 Bézier Curve Support with XYZE destination and IJPQ offsets
//#define BEZIER_CURVE_SUPPORT // Requires ~2666 bytes
#if ANY(ARC_SUPPORT, BEZIER_CURVE_SUPPORT)
//#define CNC_WORKSPACE_PLANES // Allow G2/G3/G5 to operate in XY, ZX, or YZ planes
#endif
/**
* Direct Stepping
*
* Comparable to the method used by Klipper, G6 direct stepping significantly
* reduces motion calculations, increases top printing speeds, and results in
* less step aliasing by calculating all motions in advance.
* Preparing your G-code: https://github.com/colinrgodsey/step-daemon
*/
//#define DIRECT_STEPPING
/**
* G38 Probe Target
*
* This option adds G38.2 and G38.3 (probe towards target)
* and optionally G38.4 and G38.5 (probe away from target).
* Set MULTIPLE_PROBING for G38 to probe more than once.
*/
//#define G38_PROBE_TARGET
#if ENABLED(G38_PROBE_TARGET)
//#define G38_PROBE_AWAY // Include G38.4 and G38.5 to probe away from target
#define G38_MINIMUM_MOVE 0.0275 // (mm) Minimum distance that will produce a move.
#endif
// Moves (or segments) with fewer steps than this will be joined with the next move
#define MIN_STEPS_PER_SEGMENT 6
/**
* Minimum delay before and after setting the stepper DIR (in ns)
* 0 : No delay (Expect at least 10µS since one Stepper ISR must transpire)
* 20 : Minimum for TMC2xxx drivers
* 200 : Minimum for A4988 drivers
* 400 : Minimum for A5984 drivers
* 500 : Minimum for LV8729 drivers (guess, no info in datasheet)
* 650 : Minimum for DRV8825 drivers
* 1500 : Minimum for TB6600 drivers (guess, no info in datasheet)
* 15000 : Minimum for TB6560 drivers (guess, no info in datasheet)
*
* Override the default value based on the driver type set in Configuration.h.
*/
//#define MINIMUM_STEPPER_POST_DIR_DELAY 650
//#define MINIMUM_STEPPER_PRE_DIR_DELAY 650
/**
* Minimum stepper driver pulse width (in µs)
* 0 : Smallest possible width the MCU can produce, compatible with TMC2xxx drivers
* 0 : Minimum 500ns for LV8729, adjusted in stepper.h
* 1 : Minimum for A4988 and A5984 stepper drivers
* 2 : Minimum for DRV8825 stepper drivers
* 3 : Minimum for TB6600 stepper drivers
* 30 : Minimum for TB6560 stepper drivers
*
* Override the default value based on the driver type set in Configuration.h.
*/
//#define MINIMUM_STEPPER_PULSE 2
/**
* Maximum stepping rate (in Hz) the stepper driver allows
* If undefined, defaults to 1MHz / (2 * MINIMUM_STEPPER_PULSE)
* 5000000 : Maximum for TMC2xxx stepper drivers
* 1000000 : Maximum for LV8729 stepper driver
* 500000 : Maximum for A4988 stepper driver
* 250000 : Maximum for DRV8825 stepper driver
* 150000 : Maximum for TB6600 stepper driver
* 15000 : Maximum for TB6560 stepper driver
*
* Override the default value based on the driver type set in Configuration.h.
*/
//#define MAXIMUM_STEPPER_RATE 250000
// @section temperature
// Control heater 0 and heater 1 in parallel.
//#define HEATERS_PARALLEL
//===========================================================================
//================================= Buffers =================================
//===========================================================================
// @section motion
// The number of linear moves that can be in the planner at once.
// The value of BLOCK_BUFFER_SIZE must be a power of 2 (e.g., 8, 16, 32)
#if ALL(HAS_MEDIA, DIRECT_STEPPING)
#define BLOCK_BUFFER_SIZE 8
#elif HAS_MEDIA
#define BLOCK_BUFFER_SIZE 16
#else
#define BLOCK_BUFFER_SIZE 16
#endif
// @section serial
// The ASCII buffer for serial input
#define MAX_CMD_SIZE 96
#define BUFSIZE 4
// Transmission to Host Buffer Size
// To save 386 bytes of flash (and TX_BUFFER_SIZE+3 bytes of RAM) set to 0.
// To buffer a simple "ok" you need 4 bytes.
// For ADVANCED_OK (M105) you need 32 bytes.
// For debug-echo: 128 bytes for the optimal speed.
// Other output doesn't need to be that speedy.
// :[0, 2, 4, 8, 16, 32, 64, 128, 256]
#define TX_BUFFER_SIZE 0
// Host Receive Buffer Size
// Without XON/XOFF flow control (see SERIAL_XON_XOFF below) 32 bytes should be enough.
// To use flow control, set this buffer size to at least 1024 bytes.
// :[0, 2, 4, 8, 16, 32, 64, 128, 256, 512, 1024, 2048]
//#define RX_BUFFER_SIZE 1024
#if RX_BUFFER_SIZE >= 1024
// Enable to have the controller send XON/XOFF control characters to
// the host to signal the RX buffer is becoming full.
//#define SERIAL_XON_XOFF
#endif
#if HAS_MEDIA
// Enable this option to collect and display the maximum
// RX queue usage after transferring a file to SD.
//#define SERIAL_STATS_MAX_RX_QUEUED
// Enable this option to collect and display the number
// of dropped bytes after a file transfer to SD.
//#define SERIAL_STATS_DROPPED_RX
#endif
// Monitor RX buffer usage
// Dump an error to the serial port if the serial receive buffer overflows.
// If you see these errors, increase the RX_BUFFER_SIZE value.
// Not supported on all platforms.
//#define RX_BUFFER_MONITOR
/**
* Emergency Command Parser
*
* Add a low-level parser to intercept certain commands as they
* enter the serial receive buffer, so they cannot be blocked.
* Currently handles M108, M112, M410, M876
* NOTE: Not yet implemented for all platforms.
*/
#define EMERGENCY_PARSER
/**
* Realtime Reporting (requires EMERGENCY_PARSER)
*
* - Report position and state of the machine (like Grbl).
* - Auto-report position during long moves.
* - Useful for CNC/LASER.
*
* Adds support for commands:
* S000 : Report State and Position while moving.
* P000 : Instant Pause / Hold while moving.
* R000 : Resume from Pause / Hold.
*
* - During Hold all Emergency Parser commands are available, as usual.
* - Enable NANODLP_Z_SYNC and NANODLP_ALL_AXIS for move command end-state reports.
*/
//#define REALTIME_REPORTING_COMMANDS
#if ENABLED(REALTIME_REPORTING_COMMANDS)
//#define FULL_REPORT_TO_HOST_FEATURE // Auto-report the machine status like Grbl CNC
#endif
// Bad Serial-connections can miss a received command by sending an 'ok'
// Therefore some clients abort after 30 seconds in a timeout.
// Some other clients start sending commands while receiving a 'wait'.
// This "wait" is only sent when the buffer is empty. 1 second is a good value here.
//#define NO_TIMEOUTS 1000 // Milliseconds
// Some clients will have this feature soon. This could make the NO_TIMEOUTS unnecessary.
//#define ADVANCED_OK
// Printrun may have trouble receiving long strings all at once.
// This option inserts short delays between lines of serial output.
#define SERIAL_OVERRUN_PROTECTION
// For serial echo, the number of digits after the decimal point
#define SERIAL_FLOAT_PRECISION 4
/**
* Set the number of proportional font spaces required to fill up a typical character space.
* This can help to better align the output of commands like `G29 O` Mesh Output.
*
* For clients that use a fixed-width font (like OctoPrint), leave this set to 1.0.
* Otherwise, adjust according to your client and font.
*/
#define PROPORTIONAL_FONT_RATIO 1.0
// @section extras
/**
* Extra Fan Speed
* Adds a secondary fan speed for each print-cooling fan.
* 'M106 P<fan> T3-255' : Set a secondary speed for <fan>
* 'M106 P<fan> T2' : Use the set secondary speed
* 'M106 P<fan> T1' : Restore the previous fan speed
*/
//#define EXTRA_FAN_SPEED
/**
* Firmware-based and LCD-controlled retract
*
* Add G10 / G11 commands for automatic firmware-based retract / recover.
* Use M207 and M208 to define parameters for retract / recover.
*
* Use M209 to enable or disable auto-retract.
* With auto-retract enabled, all G1 E moves within the set range
* will be converted to firmware-based retract/recover moves.
*
* Be sure to turn off auto-retract during filament change.
*
* Note that M207 / M208 / M209 settings are saved to EEPROM.
*/
//#define FWRETRACT
#if ENABLED(FWRETRACT)
#define FWRETRACT_AUTORETRACT // Override slicer retractions
#if ENABLED(FWRETRACT_AUTORETRACT)
#define MIN_AUTORETRACT 0.1 // (mm) Don't convert E moves under this length
#define MAX_AUTORETRACT 10.0 // (mm) Don't convert E moves over this length
#endif
#define RETRACT_LENGTH 3 // (mm) Default retract length (positive value)
#define RETRACT_LENGTH_SWAP 13 // (mm) Default swap retract length (positive value)
#define RETRACT_FEEDRATE 45 // (mm/s) Default feedrate for retracting
#define RETRACT_ZRAISE 0 // (mm) Default retract Z-raise
#define RETRACT_RECOVER_LENGTH 0 // (mm) Default additional recover length (added to retract length on recover)
#define RETRACT_RECOVER_LENGTH_SWAP 0 // (mm) Default additional swap recover length (added to retract length on recover from toolchange)
#define RETRACT_RECOVER_FEEDRATE 8 // (mm/s) Default feedrate for recovering from retraction
#define RETRACT_RECOVER_FEEDRATE_SWAP 8 // (mm/s) Default feedrate for recovering from swap retraction
#if ENABLED(MIXING_EXTRUDER)
//#define RETRACT_SYNC_MIXING // Retract and restore all mixing steppers simultaneously
#endif
#endif
/**
* Universal tool change settings.
* Applies to all types of extruders except where explicitly noted.
*/
#if HAS_MULTI_EXTRUDER
// Z raise distance for tool-change, as needed for some extruders
#define TOOLCHANGE_ZRAISE 2 // (mm)
//#define TOOLCHANGE_ZRAISE_BEFORE_RETRACT // Apply raise before swap retraction (if enabled)
//#define TOOLCHANGE_NO_RETURN // Never return to previous position on tool-change
#if ENABLED(TOOLCHANGE_NO_RETURN)
//#define EVENT_GCODE_AFTER_TOOLCHANGE "G12X" // Extra G-code to run after tool-change
#endif
/**
* Extra G-code to run while executing tool-change commands. Can be used to use an additional
* stepper motor (e.g., I axis in Configuration.h) to drive the tool-changer.
*/
//#define EVENT_GCODE_TOOLCHANGE_T0 "G28 A\nG1 A0" // Extra G-code to run while executing tool-change command T0
//#define EVENT_GCODE_TOOLCHANGE_T1 "G1 A10" // Extra G-code to run while executing tool-change command T1
//#define EVENT_GCODE_TOOLCHANGE_ALWAYS_RUN // Always execute above G-code sequences. Use with caution!
/**
* Consider coordinates for EVENT_GCODE_TOOLCHANGE_Tx as relative to T0
* so that moves in the specified axes are the same for all tools.
*/
//#define TC_GCODE_USE_GLOBAL_X // Use X position relative to Tool 0
//#define TC_GCODE_USE_GLOBAL_Y // Use Y position relative to Tool 0
//#define TC_GCODE_USE_GLOBAL_Z // Use Z position relative to Tool 0
/**
* Tool Sensors detect when tools have been picked up or dropped.
* Requires the pins TOOL_SENSOR1_PIN, TOOL_SENSOR2_PIN, etc.
*/
//#define TOOL_SENSOR
/**
* Retract and prime filament on tool-change to reduce
* ooze and stringing and to get cleaner transitions.
*/
//#define TOOLCHANGE_FILAMENT_SWAP
#if ENABLED(TOOLCHANGE_FILAMENT_SWAP)
// Load / Unload
#define TOOLCHANGE_FS_LENGTH 12 // (mm) Load / Unload length
#define TOOLCHANGE_FS_EXTRA_RESUME_LENGTH 0 // (mm) Extra length for better restart. Adjust with LCD or M217 B.
#define TOOLCHANGE_FS_RETRACT_SPEED (50*60) // (mm/min) (Unloading)
#define TOOLCHANGE_FS_UNRETRACT_SPEED (25*60) // (mm/min) (On SINGLENOZZLE or Bowden loading must be slowed down)
// Longer prime to clean out a SINGLENOZZLE
#define TOOLCHANGE_FS_EXTRA_PRIME 0 // (mm) Extra priming length
#define TOOLCHANGE_FS_PRIME_SPEED (4.6*60) // (mm/min) Extra priming feedrate
#define TOOLCHANGE_FS_WIPE_RETRACT 0 // (mm) Cutting retraction out of park, for less stringing, better wipe, etc. Adjust with LCD or M217 G.
// Cool after prime to reduce stringing
#define TOOLCHANGE_FS_FAN -1 // Fan index or -1 to skip
#define TOOLCHANGE_FS_FAN_SPEED 255 // 0-255
#define TOOLCHANGE_FS_FAN_TIME 10 // (seconds)
// Use TOOLCHANGE_FS_PRIME_SPEED feedrate the first time each extruder is primed
//#define TOOLCHANGE_FS_SLOW_FIRST_PRIME
/**
* Prime T0 the first time T0 is sent to the printer:
* [ Power-On -> T0 { Activate & Prime T0 } -> T1 { Retract T0, Activate & Prime T1 } ]
* If disabled, no priming on T0 until switching back to T0 from another extruder:
* [ Power-On -> T0 { T0 Activated } -> T1 { Activate & Prime T1 } -> T0 { Retract T1, Activate & Prime T0 } ]
* Enable with M217 V1 before printing to avoid unwanted priming on host connect.
*/
//#define TOOLCHANGE_FS_PRIME_FIRST_USED
/**
* Tool Change Migration
* This feature provides G-code and LCD options to switch tools mid-print.
* All applicable tool properties are migrated so the print can continue.
* Tools must be closely matching and other restrictions may apply.
* Useful to:
* - Change filament color without interruption
* - Switch spools automatically on filament runout
* - Switch to a different nozzle on an extruder jam
*/
#define TOOLCHANGE_MIGRATION_FEATURE
#endif
/**
* Position to park head during tool change.
* Doesn't apply to SWITCHING_TOOLHEAD, DUAL_X_CARRIAGE, or PARKING_EXTRUDER
*/
//#define TOOLCHANGE_PARK
#if ENABLED(TOOLCHANGE_PARK)
#define TOOLCHANGE_PARK_XY { X_MIN_POS + 10, Y_MIN_POS + 10 }
#define TOOLCHANGE_PARK_XY_FEEDRATE 6000 // (mm/min)
//#define TOOLCHANGE_PARK_X_ONLY // X axis only move
//#define TOOLCHANGE_PARK_Y_ONLY // Y axis only move
#endif
#endif // HAS_MULTI_EXTRUDER
// @section advanced pause
/**
* Advanced Pause for Filament Change
* - Adds the G-code M600 Filament Change to initiate a filament change.
* - This feature is required for the default FILAMENT_RUNOUT_SCRIPT.
*
* Requirements:
* - For Filament Change parking enable and configure NOZZLE_PARK_FEATURE.
* - For user interaction enable an LCD display, HOST_PROMPT_SUPPORT, or EMERGENCY_PARSER.
*
* Enable PARK_HEAD_ON_PAUSE to add the G-code M125 Pause and Park.
*/
#define ADVANCED_PAUSE_FEATURE
#if ENABLED(ADVANCED_PAUSE_FEATURE)
#define PAUSE_PARK_RETRACT_FEEDRATE 60 // (mm/s) Initial retract feedrate.
#define PAUSE_PARK_RETRACT_LENGTH 2 // (mm) Initial retract.
// This short retract is done immediately, before parking the nozzle.
#define FILAMENT_CHANGE_UNLOAD_FEEDRATE 10 // (mm/s) Unload filament feedrate. This can be pretty fast.
#define FILAMENT_CHANGE_UNLOAD_ACCEL 25 // (mm/s^2) Lower acceleration may allow a faster feedrate.
#define FILAMENT_CHANGE_UNLOAD_LENGTH 100 // (mm) The length of filament for a complete unload.
// For Bowden, the full length of the tube and nozzle.
// For direct drive, the full length of the nozzle.
// Set to 0 for manual unloading.
#define FILAMENT_CHANGE_SLOW_LOAD_FEEDRATE 6 // (mm/s) Slow move when starting load.
#define FILAMENT_CHANGE_SLOW_LOAD_LENGTH 0 // (mm) Slow length, to allow time to insert material.
// 0 to disable start loading and skip to fast load only
#define FILAMENT_CHANGE_FAST_LOAD_FEEDRATE 6 // (mm/s) Load filament feedrate. This can be pretty fast.
#define FILAMENT_CHANGE_FAST_LOAD_ACCEL 25 // (mm/s^2) Lower acceleration may allow a faster feedrate.
#define FILAMENT_CHANGE_FAST_LOAD_LENGTH 0 // (mm) Load length of filament, from extruder gear to nozzle.
// For Bowden, the full length of the tube and nozzle.
// For direct drive, the full length of the nozzle.
//#define ADVANCED_PAUSE_CONTINUOUS_PURGE // Purge continuously up to the purge length until interrupted.
#define ADVANCED_PAUSE_PURGE_FEEDRATE 3 // (mm/s) Extrude feedrate (after loading). Should be slower than load feedrate.
#define ADVANCED_PAUSE_PURGE_LENGTH 50 // (mm) Length to extrude after loading.
// Set to 0 for manual extrusion.
// Filament can be extruded repeatedly from the Filament Change menu
// until extrusion is consistent, and to purge old filament.
#define ADVANCED_PAUSE_RESUME_PRIME 0 // (mm) Extra distance to prime nozzle after returning from park.
//#define ADVANCED_PAUSE_FANS_PAUSE // Turn off print-cooling fans while the machine is paused.
// Filament Unload does a Retract, Delay, and Purge first:
#define FILAMENT_UNLOAD_PURGE_RETRACT 13 // (mm) Unload initial retract length.
#define FILAMENT_UNLOAD_PURGE_DELAY 5000 // (ms) Delay for the filament to cool after retract.
#define FILAMENT_UNLOAD_PURGE_LENGTH 8 // (mm) An unretract is done, then this length is purged.
#define FILAMENT_UNLOAD_PURGE_FEEDRATE 25 // (mm/s) feedrate to purge before unload
#define PAUSE_PARK_NOZZLE_TIMEOUT 45 // (seconds) Time limit before the nozzle is turned off for safety.
#define FILAMENT_CHANGE_ALERT_BEEPS 10 // Number of alert beeps to play when a response is needed.
#define PAUSE_PARK_NO_STEPPER_TIMEOUT // Enable for XYZ steppers to stay powered on during filament change.
//#define FILAMENT_CHANGE_RESUME_ON_INSERT // Automatically continue / load filament when runout sensor is triggered again.
//#define PAUSE_REHEAT_FAST_RESUME // Reduce number of waits by not prompting again post-timeout before continuing.
#define PARK_HEAD_ON_PAUSE // Park the nozzle during pause and filament change.
//#define HOME_BEFORE_FILAMENT_CHANGE // If needed, home before parking for filament change
#define FILAMENT_LOAD_UNLOAD_GCODES // Add M701/M702 Load/Unload G-codes, plus Load/Unload in the LCD Prepare menu.
//#define FILAMENT_UNLOAD_ALL_EXTRUDERS // Allow M702 to unload all extruders above a minimum target temp (as set by M302)
#endif
// @section tmc_smart
/**
* Trinamic Smart Drivers
*
* To use TMC2130, TMC2160, TMC2660, TMC5130, TMC5160 stepper drivers in SPI mode:
* - Connect your SPI pins to the Hardware SPI interface on the board.
* Some boards have simple jumper connections! See your board's documentation.
* - Define the required Stepper CS pins in your `pins_MYBOARD.h` file.
* (See the RAMPS pins, for example.)
* - You can also use Software SPI with GPIO pins instead of Hardware SPI.
*
* To use TMC220x stepper drivers with Serial UART:
* - Connect PDN_UART to the #_SERIAL_TX_PIN through a 1K resistor.
* For reading capabilities also connect PDN_UART to #_SERIAL_RX_PIN with no resistor.
* Some boards have simple jumper connections! See your board's documentation.
* - These drivers can also be used with Hardware Serial.
*
* The TMC26XStepper library is required for TMC26X stepper drivers.
* https://github.com/MarlinFirmware/TMC26XStepper
*
* The TMCStepper library is required for other TMC stepper drivers.
* https://github.com/teemuatlut/TMCStepper
*
* @section tmc/config
*/
#if HAS_TRINAMIC_CONFIG || HAS_TMC26X
#define HOLD_MULTIPLIER 0.5 // Scales down the holding current from run current
/**
* Interpolate microsteps to 256
* Override for each driver with <driver>_INTERPOLATE settings below
*/
#define INTERPOLATE true
#if AXIS_IS_TMC_CONFIG(X)
#define X_CURRENT 1060 // (mA) RMS current. Multiply by 1.414 for peak current.
#define X_CURRENT_HOME X_CURRENT // (mA) RMS current for sensorless homing
#define X_MICROSTEPS 16 // 0..256
#define X_RSENSE 0.11 // Multiplied x1000 for TMC26X
#define X_CHAIN_POS -1 // -1..0: Not chained. 1: MCU MOSI connected. 2: Next in chain, ...
//#define X_INTERPOLATE true // Enable to override 'INTERPOLATE' for the X axis
//#define X_HOLD_MULTIPLIER 0.5 // Enable to override 'HOLD_MULTIPLIER' for the X axis
#endif
#if AXIS_IS_TMC_CONFIG(X2)
#define X2_CURRENT X_CURRENT
#define X2_CURRENT_HOME X_CURRENT_HOME
#define X2_MICROSTEPS X_MICROSTEPS
#define X2_RSENSE X_RSENSE
#define X2_CHAIN_POS -1
//#define X2_INTERPOLATE true
//#define X2_HOLD_MULTIPLIER 0.5
#endif
#if AXIS_IS_TMC_CONFIG(Y)
#define Y_CURRENT 1060
#define Y_CURRENT_HOME Y_CURRENT
#define Y_MICROSTEPS 16
#define Y_RSENSE 0.11
#define Y_CHAIN_POS -1
//#define Y_INTERPOLATE true
//#define Y_HOLD_MULTIPLIER 0.5
#endif
#if AXIS_IS_TMC_CONFIG(Y2)
#define Y2_CURRENT Y_CURRENT
#define Y2_CURRENT_HOME Y_CURRENT_HOME
#define Y2_MICROSTEPS Y_MICROSTEPS
#define Y2_RSENSE Y_RSENSE
#define Y2_CHAIN_POS -1
//#define Y2_INTERPOLATE true
//#define Y2_HOLD_MULTIPLIER 0.5
#endif
#if AXIS_IS_TMC_CONFIG(Z)
#define Z_CURRENT 1060
#define Z_CURRENT_HOME Z_CURRENT
#define Z_MICROSTEPS 16
#define Z_RSENSE 0.11
#define Z_CHAIN_POS -1
//#define Z_INTERPOLATE true
//#define Z_HOLD_MULTIPLIER 0.5
#endif
#if AXIS_IS_TMC_CONFIG(Z2)
#define Z2_CURRENT Z_CURRENT
#define Z2_CURRENT_HOME Z_CURRENT_HOME
#define Z2_MICROSTEPS Z_MICROSTEPS
#define Z2_RSENSE Z_RSENSE
#define Z2_CHAIN_POS -1
//#define Z2_INTERPOLATE true
//#define Z2_HOLD_MULTIPLIER 0.5
#endif
#if AXIS_IS_TMC_CONFIG(Z3)
#define Z3_CURRENT Z_CURRENT
#define Z3_CURRENT_HOME Z_CURRENT_HOME
#define Z3_MICROSTEPS Z_MICROSTEPS
#define Z3_RSENSE Z_RSENSE
#define Z3_CHAIN_POS -1
//#define Z3_INTERPOLATE true
//#define Z3_HOLD_MULTIPLIER 0.5
#endif
#if AXIS_IS_TMC_CONFIG(Z4)
#define Z4_CURRENT Z_CURRENT
#define Z4_CURRENT_HOME Z_CURRENT_HOME
#define Z4_MICROSTEPS Z_MICROSTEPS
#define Z4_RSENSE Z_RSENSE
#define Z4_CHAIN_POS -1
//#define Z4_INTERPOLATE true
//#define Z4_HOLD_MULTIPLIER 0.5
#endif
#if AXIS_IS_TMC_CONFIG(I)
#define I_CURRENT 800
#define I_CURRENT_HOME I_CURRENT
#define I_MICROSTEPS 16
#define I_RSENSE 0.11
#define I_CHAIN_POS -1
//#define I_INTERPOLATE true
//#define I_HOLD_MULTIPLIER 0.5
#endif
#if AXIS_IS_TMC_CONFIG(J)
#define J_CURRENT 800
#define J_CURRENT_HOME J_CURRENT
#define J_MICROSTEPS 16
#define J_RSENSE 0.11
#define J_CHAIN_POS -1
//#define J_INTERPOLATE true
//#define J_HOLD_MULTIPLIER 0.5
#endif
#if AXIS_IS_TMC_CONFIG(K)
#define K_CURRENT 800
#define K_CURRENT_HOME K_CURRENT
#define K_MICROSTEPS 16
#define K_RSENSE 0.11
#define K_CHAIN_POS -1
//#define K_INTERPOLATE true
//#define K_HOLD_MULTIPLIER 0.5
#endif
#if AXIS_IS_TMC_CONFIG(U)
#define U_CURRENT 800
#define U_CURRENT_HOME U_CURRENT
#define U_MICROSTEPS 8
#define U_RSENSE 0.11
#define U_CHAIN_POS -1
//#define U_INTERPOLATE true
//#define U_HOLD_MULTIPLIER 0.5
#endif
#if AXIS_IS_TMC_CONFIG(V)
#define V_CURRENT 800
#define V_CURRENT_HOME V_CURRENT
#define V_MICROSTEPS 8
#define V_RSENSE 0.11
#define V_CHAIN_POS -1
//#define V_INTERPOLATE true
//#define V_HOLD_MULTIPLIER 0.5
#endif
#if AXIS_IS_TMC_CONFIG(W)
#define W_CURRENT 800
#define W_CURRENT_HOME W_CURRENT
#define W_MICROSTEPS 8
#define W_RSENSE 0.11
#define W_CHAIN_POS -1
//#define W_INTERPOLATE true
//#define W_HOLD_MULTIPLIER 0.5
#endif
#if AXIS_IS_TMC_CONFIG(E0)
#define E0_CURRENT 1060
#define E0_MICROSTEPS 16
#define E0_RSENSE 0.11
#define E0_CHAIN_POS -1
//#define E0_INTERPOLATE true
//#define E0_HOLD_MULTIPLIER 0.5
#endif
#if AXIS_IS_TMC_CONFIG(E1)
#define E1_CURRENT E0_CURRENT
#define E1_MICROSTEPS E0_MICROSTEPS
#define E1_RSENSE E0_RSENSE
#define E1_CHAIN_POS -1
//#define E1_INTERPOLATE true
//#define E1_HOLD_MULTIPLIER 0.5
#endif
#if AXIS_IS_TMC_CONFIG(E2)
#define E2_CURRENT E0_CURRENT
#define E2_MICROSTEPS E0_MICROSTEPS
#define E2_RSENSE E0_RSENSE
#define E2_CHAIN_POS -1
//#define E2_INTERPOLATE true
//#define E2_HOLD_MULTIPLIER 0.5
#endif
#if AXIS_IS_TMC_CONFIG(E3)
#define E3_CURRENT E0_CURRENT
#define E3_MICROSTEPS E0_MICROSTEPS
#define E3_RSENSE E0_RSENSE
#define E3_CHAIN_POS -1
//#define E3_INTERPOLATE true
//#define E3_HOLD_MULTIPLIER 0.5
#endif
#if AXIS_IS_TMC_CONFIG(E4)
#define E4_CURRENT E0_CURRENT
#define E4_MICROSTEPS E0_MICROSTEPS
#define E4_RSENSE E0_RSENSE
#define E4_CHAIN_POS -1
//#define E4_INTERPOLATE true
//#define E4_HOLD_MULTIPLIER 0.5
#endif
#if AXIS_IS_TMC_CONFIG(E5)
#define E5_CURRENT E0_CURRENT
#define E5_MICROSTEPS E0_MICROSTEPS
#define E5_RSENSE E0_RSENSE
#define E5_CHAIN_POS -1
//#define E5_INTERPOLATE true
//#define E5_HOLD_MULTIPLIER 0.5
#endif
#if AXIS_IS_TMC_CONFIG(E6)
#define E6_CURRENT E0_CURRENT
#define E6_MICROSTEPS E0_MICROSTEPS
#define E6_RSENSE E0_RSENSE
#define E6_CHAIN_POS -1
//#define E6_INTERPOLATE true
//#define E6_HOLD_MULTIPLIER 0.5
#endif
#if AXIS_IS_TMC_CONFIG(E7)
#define E7_CURRENT E0_CURRENT
#define E7_MICROSTEPS E0_MICROSTEPS
#define E7_RSENSE E0_RSENSE
#define E7_CHAIN_POS -1
//#define E7_INTERPOLATE true
//#define E7_HOLD_MULTIPLIER 0.5
#endif
// @section tmc/spi
/**
* Override default SPI pins for TMC2130, TMC2160, TMC2660, TMC5130 and TMC5160 drivers here.
* The default pins can be found in your board's pins file.
*/
//#define X_CS_PIN -1
//#define Y_CS_PIN -1
//#define Z_CS_PIN -1
//#define X2_CS_PIN -1
//#define Y2_CS_PIN -1
//#define Z2_CS_PIN -1
//#define Z3_CS_PIN -1
//#define Z4_CS_PIN -1
//#define I_CS_PIN -1
//#define J_CS_PIN -1
//#define K_CS_PIN -1
//#define U_CS_PIN -1
//#define V_CS_PIN -1
//#define W_CS_PIN -1
//#define E0_CS_PIN -1
//#define E1_CS_PIN -1
//#define E2_CS_PIN -1
//#define E3_CS_PIN -1
//#define E4_CS_PIN -1
//#define E5_CS_PIN -1
//#define E6_CS_PIN -1
//#define E7_CS_PIN -1
/**
* Software option for SPI driven drivers (TMC2130, TMC2160, TMC2660, TMC5130 and TMC5160).
* The default SW SPI pins are defined the respective pins files,
* but you can override or define them here.
*/
//#define TMC_USE_SW_SPI
//#define TMC_SPI_MOSI -1
//#define TMC_SPI_MISO -1
//#define TMC_SPI_SCK -1
// @section tmc/serial
/**
* Four TMC2209 drivers can use the same HW/SW serial port with hardware configured addresses.
* Set the address using jumpers on pins MS1 and MS2.
* Address | MS1 | MS2
* 0 | LOW | LOW
* 1 | HIGH | LOW
* 2 | LOW | HIGH
* 3 | HIGH | HIGH
*
* Set *_SERIAL_TX_PIN and *_SERIAL_RX_PIN to match for all drivers
* on the same serial port, either here or in your board's pins file.
*/
//#define X_SLAVE_ADDRESS 0
//#define Y_SLAVE_ADDRESS 0
//#define Z_SLAVE_ADDRESS 0
//#define X2_SLAVE_ADDRESS 0
//#define Y2_SLAVE_ADDRESS 0
//#define Z2_SLAVE_ADDRESS 0
//#define Z3_SLAVE_ADDRESS 0
//#define Z4_SLAVE_ADDRESS 0
//#define I_SLAVE_ADDRESS 0
//#define J_SLAVE_ADDRESS 0
//#define K_SLAVE_ADDRESS 0
//#define U_SLAVE_ADDRESS 0
//#define V_SLAVE_ADDRESS 0
//#define W_SLAVE_ADDRESS 0
//#define E0_SLAVE_ADDRESS 0
//#define E1_SLAVE_ADDRESS 0
//#define E2_SLAVE_ADDRESS 0
//#define E3_SLAVE_ADDRESS 0
//#define E4_SLAVE_ADDRESS 0
//#define E5_SLAVE_ADDRESS 0
//#define E6_SLAVE_ADDRESS 0
//#define E7_SLAVE_ADDRESS 0
// @section tmc/smart
/**
* Software enable
*
* Use for drivers that do not use a dedicated enable pin, but rather handle the same
* function through a communication line such as SPI or UART.
*/
//#define SOFTWARE_DRIVER_ENABLE
// @section tmc/stealthchop
/**
* TMC2130, TMC2160, TMC2208, TMC2209, TMC5130 and TMC5160 only
* Use Trinamic's ultra quiet stepping mode.
* When disabled, Marlin will use spreadCycle stepping mode.
*/
#if HAS_STEALTHCHOP
#define STEALTHCHOP_XY
#define STEALTHCHOP_Z
#define STEALTHCHOP_I
#define STEALTHCHOP_J
#define STEALTHCHOP_K
#define STEALTHCHOP_U
#define STEALTHCHOP_V
#define STEALTHCHOP_W
#define STEALTHCHOP_E
#endif
/**
* Optimize spreadCycle chopper parameters by using predefined parameter sets
* or with the help of an example included in the library.
* Provided parameter sets are
* CHOPPER_DEFAULT_12V
* CHOPPER_DEFAULT_19V
* CHOPPER_DEFAULT_24V
* CHOPPER_DEFAULT_36V
* CHOPPER_09STEP_24V // 0.9 degree steppers (24V)
* CHOPPER_PRUSAMK3_24V // Imported parameters from the official Průša firmware for MK3 (24V)
* CHOPPER_MARLIN_119 // Old defaults from Marlin v1.1.9
*
* Define your own with:
* { <off_time[1..15]>, <hysteresis_end[-3..12]>, hysteresis_start[1..8] }
*/
#define CHOPPER_TIMING CHOPPER_DEFAULT_12V // All axes (override below)
//#define CHOPPER_TIMING_X CHOPPER_TIMING // For X Axes (override below)
//#define CHOPPER_TIMING_X2 CHOPPER_TIMING_X
//#define CHOPPER_TIMING_Y CHOPPER_TIMING // For Y Axes (override below)
//#define CHOPPER_TIMING_Y2 CHOPPER_TIMING_Y
//#define CHOPPER_TIMING_Z CHOPPER_TIMING // For Z Axes (override below)
//#define CHOPPER_TIMING_Z2 CHOPPER_TIMING_Z
//#define CHOPPER_TIMING_Z3 CHOPPER_TIMING_Z
//#define CHOPPER_TIMING_Z4 CHOPPER_TIMING_Z
//#define CHOPPER_TIMING_I CHOPPER_TIMING // For I Axis
//#define CHOPPER_TIMING_J CHOPPER_TIMING // For J Axis
//#define CHOPPER_TIMING_K CHOPPER_TIMING // For K Axis
//#define CHOPPER_TIMING_U CHOPPER_TIMING // For U Axis
//#define CHOPPER_TIMING_V CHOPPER_TIMING // For V Axis
//#define CHOPPER_TIMING_W CHOPPER_TIMING // For W Axis
//#define CHOPPER_TIMING_E CHOPPER_TIMING // For Extruders (override below)
//#define CHOPPER_TIMING_E1 CHOPPER_TIMING_E
//#define CHOPPER_TIMING_E2 CHOPPER_TIMING_E
//#define CHOPPER_TIMING_E3 CHOPPER_TIMING_E
//#define CHOPPER_TIMING_E4 CHOPPER_TIMING_E
//#define CHOPPER_TIMING_E5 CHOPPER_TIMING_E
//#define CHOPPER_TIMING_E6 CHOPPER_TIMING_E
//#define CHOPPER_TIMING_E7 CHOPPER_TIMING_E
// @section tmc/status
/**
* Monitor Trinamic drivers
* for error conditions like overtemperature and short to ground.
* To manage over-temp Marlin can decrease the driver current until the error condition clears.
* Other detected conditions can be used to stop the current print.
* Relevant G-codes:
* M906 - Set or get motor current in milliamps using axis codes X, Y, Z, E. Report values if no axis codes given.
* M911 - Report stepper driver overtemperature pre-warn condition.
* M912 - Clear stepper driver overtemperature pre-warn condition flag.
* M122 - Report driver parameters (Requires TMC_DEBUG)
*/
#define MONITOR_DRIVER_STATUS
#if ENABLED(MONITOR_DRIVER_STATUS)
#define CURRENT_STEP_DOWN 50 // [mA]
#define REPORT_CURRENT_CHANGE
#define STOP_ON_ERROR
#endif
// @section tmc/hybrid
/**
* TMC2130, TMC2160, TMC2208, TMC2209, TMC5130 and TMC5160 only
* The driver will switch to spreadCycle when stepper speed is over HYBRID_THRESHOLD.
* This mode allows for faster movements at the expense of higher noise levels.
* STEALTHCHOP_(XY|Z|E) must be enabled to use HYBRID_THRESHOLD.
* M913 X/Y/Z/E to live tune the setting
*/
#define HYBRID_THRESHOLD
#define X_HYBRID_THRESHOLD 100 // [mm/s]
#define X2_HYBRID_THRESHOLD 100
#define Y_HYBRID_THRESHOLD 100
#define Y2_HYBRID_THRESHOLD 100
#define Z_HYBRID_THRESHOLD 3
#define Z2_HYBRID_THRESHOLD 3
#define Z3_HYBRID_THRESHOLD 3
#define Z4_HYBRID_THRESHOLD 3
#define I_HYBRID_THRESHOLD 3 // [linear=mm/s, rotational=°/s]
#define J_HYBRID_THRESHOLD 3 // [linear=mm/s, rotational=°/s]
#define K_HYBRID_THRESHOLD 3 // [linear=mm/s, rotational=°/s]
#define U_HYBRID_THRESHOLD 3 // [mm/s]
#define V_HYBRID_THRESHOLD 3
#define W_HYBRID_THRESHOLD 3
#define E0_HYBRID_THRESHOLD 30
#define E1_HYBRID_THRESHOLD 30
#define E2_HYBRID_THRESHOLD 30
#define E3_HYBRID_THRESHOLD 30
#define E4_HYBRID_THRESHOLD 30
#define E5_HYBRID_THRESHOLD 30
#define E6_HYBRID_THRESHOLD 30
#define E7_HYBRID_THRESHOLD 30
/**
* Use StallGuard to home / probe X, Y, Z.
*
* TMC2130, TMC2160, TMC2209, TMC2660, TMC5130, and TMC5160 only
* Connect the stepper driver's DIAG1 pin to the X/Y endstop pin.
* X, Y, and Z homing will always be done in spreadCycle mode.
*
* X/Y/Z_STALL_SENSITIVITY is the default stall threshold.
* Use M914 X Y Z to set the stall threshold at runtime:
*
* Sensitivity TMC2209 Others
* HIGHEST 255 -64 (Too sensitive => False positive)
* LOWEST 0 63 (Too insensitive => No trigger)
*
* It is recommended to set HOMING_BUMP_MM to { 0, 0, 0 }.
*
* SPI_ENDSTOPS *** TMC2130/TMC5160 Only ***
* Poll the driver through SPI to determine load when homing.
* Removes the need for a wire from DIAG1 to an endstop pin.
*
* IMPROVE_HOMING_RELIABILITY tunes acceleration and jerk when
* homing and adds a guard period for endstop triggering.
*
* Comment *_STALL_SENSITIVITY to disable sensorless homing for that axis.
* @section tmc/stallguard
*/
//#define SENSORLESS_HOMING // StallGuard capable drivers only
#if ANY(SENSORLESS_HOMING, SENSORLESS_PROBING)
// TMC2209: 0...255. TMC2130: -64...63
#define X_STALL_SENSITIVITY 0
#define X2_STALL_SENSITIVITY X_STALL_SENSITIVITY
#define Y_STALL_SENSITIVITY 0
#define Y2_STALL_SENSITIVITY Y_STALL_SENSITIVITY
#define Z_STALL_SENSITIVITY 180
//#define Z2_STALL_SENSITIVITY Z_STALL_SENSITIVITY
//#define Z3_STALL_SENSITIVITY Z_STALL_SENSITIVITY
//#define Z4_STALL_SENSITIVITY Z_STALL_SENSITIVITY
//#define I_STALL_SENSITIVITY 8
//#define J_STALL_SENSITIVITY 8
//#define K_STALL_SENSITIVITY 8
//#define U_STALL_SENSITIVITY 8
//#define V_STALL_SENSITIVITY 8
//#define W_STALL_SENSITIVITY 8
//#define SPI_ENDSTOPS // TMC2130/TMC5160 only
//#define IMPROVE_HOMING_RELIABILITY
#endif
// @section tmc/config
/**
* TMC Homing stepper phase.
*
* Improve homing repeatability by homing to stepper coil's nearest absolute
* phase position. Trinamic drivers use a stepper phase table with 1024 values
* spanning 4 full steps with 256 positions each (ergo, 1024 positions).
* Full step positions (128, 384, 640, 896) have the highest holding torque.
*
* Values from 0..1023, -1 to disable homing phase for that axis.
*/
#define TMC_HOME_PHASE { 896, 896, 896 }
/**
* Step on both rising and falling edge signals (as with a square wave).
*/
#define EDGE_STEPPING
/**
* Enable M122 debugging command for TMC stepper drivers.
* M122 S0/1 will enable continuous reporting.
*/
//#define TMC_DEBUG
/**
* You can set your own advanced settings by filling in predefined functions.
* A list of available functions can be found on the library github page
* https://github.com/teemuatlut/TMCStepper
*
* Example:
* #define TMC_ADV() { \
* stepperX.diag0_otpw(1); \
* stepperY.intpol(0); \
* }
*/
#define TMC_ADV() { }
#endif // HAS_TRINAMIC_CONFIG || HAS_TMC26X
// @section i2cbus
//
// I2C Master ID for LPC176x LCD and Digital Current control
// Does not apply to other peripherals based on the Wire library.
//
//#define I2C_MASTER_ID 1 // Set a value from 0 to 2
/**
* TWI/I2C BUS
*
* This feature is an EXPERIMENTAL feature so it shall not be used on production
* machines. Enabling this will allow you to send and receive I2C data from slave
* devices on the bus.
*
* ; Example #1
* ; This macro send the string "Marlin" to the slave device with address 0x63 (99)
* ; It uses multiple M260 commands with one B<base 10> arg
* M260 A99 ; Target slave address
* M260 B77 ; M
* M260 B97 ; a
* M260 B114 ; r
* M260 B108 ; l
* M260 B105 ; i
* M260 B110 ; n
* M260 S1 ; Send the current buffer
*
* ; Example #2
* ; Request 6 bytes from slave device with address 0x63 (99)
* M261 A99 B5
*
* ; Example #3
* ; Example serial output of a M261 request
* echo:i2c-reply: from:99 bytes:5 data:hello
*/
//#define EXPERIMENTAL_I2CBUS
#if ENABLED(EXPERIMENTAL_I2CBUS)
#define I2C_SLAVE_ADDRESS 0 // Set a value from 8 to 127 to act as a slave
#endif
// @section photo
/**
* Photo G-code
* Add the M240 G-code to take a photo.
* The photo can be triggered by a digital pin or a physical movement.
*/
//#define PHOTO_GCODE
#if ENABLED(PHOTO_GCODE)
// A position to move to (and raise Z) before taking the photo
//#define PHOTO_POSITION { X_MAX_POS - 5, Y_MAX_POS, 0 } // { xpos, ypos, zraise } (M240 X Y Z)
//#define PHOTO_DELAY_MS 100 // (ms) Duration to pause before moving back (M240 P)
//#define PHOTO_RETRACT_MM 6.5 // (mm) E retract/recover for the photo move (M240 R S)
// Canon RC-1 or homebrew digital camera trigger
// Data from: https://www.doc-diy.net/photo/rc-1_hacked/
//#define PHOTOGRAPH_PIN 23
// Canon Hack Development Kit
// https://captain-slow.dk/2014/03/09/3d-printing-timelapses/
//#define CHDK_PIN 4
// Optional second move with delay to trigger the camera shutter
//#define PHOTO_SWITCH_POSITION { X_MAX_POS, Y_MAX_POS } // { xpos, ypos } (M240 I J)
// Duration to hold the switch or keep CHDK_PIN high
//#define PHOTO_SWITCH_MS 50 // (ms) (M240 D)
/**
* PHOTO_PULSES_US may need adjustment depending on board and camera model.
* Pin must be running at 48.4kHz.
* Be sure to use a PHOTOGRAPH_PIN which can rise and fall quick enough.
* (e.g., MKS SBase temp sensor pin was too slow, so used P1.23 on J8.)
*
* Example pulse data for Nikon: https://bit.ly/2FKD0Aq
* IR Wiring: https://git.io/JvJf7
*/
//#define PHOTO_PULSES_US { 2000, 27850, 400, 1580, 400, 3580, 400 } // (µs) Durations for each 48.4kHz oscillation
#ifdef PHOTO_PULSES_US
#define PHOTO_PULSE_DELAY_US 13 // (µs) Approximate duration of each HIGH and LOW pulse in the oscillation
#endif
#endif
// @section cnc
/**
* Spindle & Laser control
*
* Add the M3, M4, and M5 commands to turn the spindle/laser on and off, and
* to set spindle speed, spindle direction, and laser power.
*
* SuperPid is a router/spindle speed controller used in the CNC milling community.
* Marlin can be used to turn the spindle on and off. It can also be used to set
* the spindle speed from 5,000 to 30,000 RPM.
*
* You'll need to select a pin for the ON/OFF function and optionally choose a 0-5V
* hardware PWM pin for the speed control and a pin for the rotation direction.
*
* See https://marlinfw.org/docs/configuration/2.0.9/laser_spindle.html for more config details.
*/
//#define SPINDLE_FEATURE
//#define LASER_FEATURE
#if ANY(SPINDLE_FEATURE, LASER_FEATURE)
#define SPINDLE_LASER_ACTIVE_STATE LOW // Set to "HIGH" if SPINDLE_LASER_ENA_PIN is active HIGH
#define SPINDLE_LASER_USE_PWM // Enable if your controller supports setting the speed/power
#if ENABLED(SPINDLE_LASER_USE_PWM)
#define SPINDLE_LASER_PWM_INVERT false // Set to "true" if the speed/power goes up when you want it to go slower
#define SPINDLE_LASER_FREQUENCY 2500 // (Hz) Spindle/laser frequency (only on supported HALs: AVR, ESP32, and LPC)
// ESP32: If SPINDLE_LASER_PWM_PIN is onboard then <=78125Hz. For I2S expander
// the frequency determines the PWM resolution. 2500Hz = 0-100, 977Hz = 0-255, ...
// (250000 / SPINDLE_LASER_FREQUENCY) = max value.
#endif
//#define AIR_EVACUATION // Cutter Vacuum / Laser Blower motor control with G-codes M10-M11
#if ENABLED(AIR_EVACUATION)
#define AIR_EVACUATION_ACTIVE LOW // Set to "HIGH" if the on/off function is active HIGH
//#define AIR_EVACUATION_PIN 42 // Override the default Cutter Vacuum or Laser Blower pin
#endif
//#define AIR_ASSIST // Air Assist control with G-codes M8-M9
#if ENABLED(AIR_ASSIST)
#define AIR_ASSIST_ACTIVE LOW // Active state on air assist pin
//#define AIR_ASSIST_PIN 44 // Override the default Air Assist pin
#endif
//#define SPINDLE_SERVO // A servo converting an angle to spindle power
#ifdef SPINDLE_SERVO
#define SPINDLE_SERVO_NR 0 // Index of servo used for spindle control
#define SPINDLE_SERVO_MIN 10 // Minimum angle for servo spindle
#endif
/**
* Speed / Power can be set ('M3 S') and displayed in terms of:
* - PWM255 (S0 - S255)
* - PERCENT (S0 - S100)
* - RPM (S0 - S50000) Best for use with a spindle
* - SERVO (S0 - S180)
*/
#define CUTTER_POWER_UNIT PWM255
/**
* Relative Cutter Power
* Normally, 'M3 O<power>' sets
* OCR power is relative to the range SPEED_POWER_MIN...SPEED_POWER_MAX.
* so input powers of 0...255 correspond to SPEED_POWER_MIN...SPEED_POWER_MAX
* instead of normal range (0 to SPEED_POWER_MAX).
* Best used with (e.g.) SuperPID router controller: S0 = 5,000 RPM and S255 = 30,000 RPM
*/
//#define CUTTER_POWER_RELATIVE // Set speed proportional to [SPEED_POWER_MIN...SPEED_POWER_MAX]
#if ENABLED(SPINDLE_FEATURE)
//#define SPINDLE_CHANGE_DIR // Enable if your spindle controller can change spindle direction
#define SPINDLE_CHANGE_DIR_STOP // Enable if the spindle should stop before changing spin direction
#define SPINDLE_INVERT_DIR false // Set to "true" if the spin direction is reversed
#define SPINDLE_LASER_POWERUP_DELAY 5000 // (ms) Delay to allow the spindle/laser to come up to speed/power
#define SPINDLE_LASER_POWERDOWN_DELAY 5000 // (ms) Delay to allow the spindle to stop
/**
* M3/M4 Power Equation
*
* Each tool uses different value ranges for speed / power control.
* These parameters are used to convert between tool power units and PWM.
*
* Speed/Power = (PWMDC / 255 * 100 - SPEED_POWER_INTERCEPT) / SPEED_POWER_SLOPE
* PWMDC = (spdpwr - SPEED_POWER_MIN) / (SPEED_POWER_MAX - SPEED_POWER_MIN) / SPEED_POWER_SLOPE
*/
#if ENABLED(SPINDLE_LASER_USE_PWM)
#define SPEED_POWER_INTERCEPT 0 // (%) 0-100 i.e., Minimum power percentage
#define SPEED_POWER_MIN 5000 // (RPM)
#define SPEED_POWER_MAX 30000 // (RPM) SuperPID router controller 0 - 30,000 RPM
#define SPEED_POWER_STARTUP 25000 // (RPM) M3/M4 speed/power default (with no arguments)
#endif
#else
#if ENABLED(SPINDLE_LASER_USE_PWM)
#define SPEED_POWER_INTERCEPT 0 // (%) 0-100 i.e., Minimum power percentage
#define SPEED_POWER_MIN 0 // (%) 0-100
#define SPEED_POWER_MAX 100 // (%) 0-100
#define SPEED_POWER_STARTUP 80 // (%) M3/M4 speed/power default (with no arguments)
#endif
// Define the minimum and maximum test pulse time values for a laser test fire function
#define LASER_TEST_PULSE_MIN 1 // (ms) Used with Laser Control Menu
#define LASER_TEST_PULSE_MAX 999 // (ms) Caution: Menu may not show more than 3 characters
#define SPINDLE_LASER_POWERUP_DELAY 50 // (ms) Delay to allow the spindle/laser to come up to speed/power
#define SPINDLE_LASER_POWERDOWN_DELAY 50 // (ms) Delay to allow the spindle to stop
/**
* Laser Safety Timeout
*
* The laser should be turned off when there is no movement for a period of time.
* Consider material flammability, cut rate, and G-code order when setting this
* value. Too low and it could turn off during a very slow move; too high and
* the material could ignite.
*/
#define LASER_SAFETY_TIMEOUT_MS 1000 // (ms)
/**
* Any M3 or G1/2/3/5 command with the 'I' parameter enables continuous inline power mode.
*
* e.g., 'M3 I' enables continuous inline power which is processed by the planner.
* Power is stored in move blocks and applied when blocks are processed by the Stepper ISR.
*
* 'M4 I' sets dynamic mode which uses the current feedrate to calculate a laser power OCR value.
*
* Any move in dynamic mode will use the current feedrate to calculate the laser power.
* Feed rates are set by the F parameter of a move command e.g. G1 X0 Y10 F6000
* Laser power would be calculated by bit shifting off 8 LSB's. In binary this is div 256.
* The calculation gives us ocr values from 0 to 255, values over F65535 will be set as 255 .
* More refined power control such as compensation for accel/decel will be addressed in future releases.
*
* M5 I clears inline mode and set power to 0, M5 sets the power output to 0 but leaves inline mode on.
*/
/**
* Enable M3 commands for laser mode inline power planner syncing.
* This feature enables any M3 S-value to be injected into the block buffers while in
* CUTTER_MODE_CONTINUOUS. The option allows M3 laser power to be committed without waiting
* for a planner synchronization
*/
//#define LASER_POWER_SYNC
/**
* Scale the laser's power in proportion to the movement rate.
*
* - Sets the entry power proportional to the entry speed over the nominal speed.
* - Ramps the power up every N steps to approximate the speed trapezoid.
* - Due to the limited power resolution this is only approximate.
*/
//#define LASER_POWER_TRAP
//
// Laser I2C Ammeter (High precision INA226 low/high side module)
//
//#define I2C_AMMETER
#if ENABLED(I2C_AMMETER)
#define I2C_AMMETER_IMAX 0.1 // (Amps) Calibration value for the expected current range
#define I2C_AMMETER_SHUNT_RESISTOR 0.1 // (Ohms) Calibration shunt resistor value
#endif
//
// Laser Coolant Flow Meter
//
//#define LASER_COOLANT_FLOW_METER
#if ENABLED(LASER_COOLANT_FLOW_METER)
#define FLOWMETER_PIN 20 // Requires an external interrupt-enabled pin (e.g., RAMPS 2,3,18,19,20,21)
#define FLOWMETER_PPL 5880 // (pulses/liter) Flow meter pulses-per-liter on the input pin
#define FLOWMETER_INTERVAL 1000 // (ms) Flow rate calculation interval in milliseconds
#define FLOWMETER_SAFETY // Prevent running the laser without the minimum flow rate set below
#if ENABLED(FLOWMETER_SAFETY)
#define FLOWMETER_MIN_LITERS_PER_MINUTE 1.5 // (liters/min) Minimum flow required when enabled
#endif
#endif
#endif
#endif // SPINDLE_FEATURE || LASER_FEATURE
/**
* Synchronous Laser Control with M106/M107
*
* Marlin normally applies M106/M107 fan speeds at a time "soon after" processing
* a planner block. This is too inaccurate for a PWM/TTL laser attached to the fan
* header (as with some add-on laser kits). Enable this option to set fan/laser
* speeds with much more exact timing for improved print fidelity.
*
* NOTE: This option sacrifices some cooling fan speed options.
*/
//#define LASER_SYNCHRONOUS_M106_M107
/**
* Coolant Control
*
* Add the M7, M8, and M9 commands to turn mist or flood coolant on and off.
*
* Note: COOLANT_MIST_PIN and/or COOLANT_FLOOD_PIN must also be defined.
*/
//#define COOLANT_CONTROL
#if ENABLED(COOLANT_CONTROL)
#define COOLANT_MIST // Enable if mist coolant is present
#define COOLANT_FLOOD // Enable if flood coolant is present
#define COOLANT_MIST_INVERT false // Set "true" if the on/off function is reversed
#define COOLANT_FLOOD_INVERT false // Set "true" if the on/off function is reversed
#endif
// @section filament width
/**
* Filament Width Sensor
*
* Measures the filament width in real-time and adjusts
* flow rate to compensate for any irregularities.
*
* Also allows the measured filament diameter to set the
* extrusion rate, so the slicer only has to specify the
* volume.
*
* Only a single extruder is supported at this time.
*
* 34 RAMPS_14 : Analog input 5 on the AUX2 connector
* 81 PRINTRBOARD : Analog input 2 on the Exp1 connector (version B,C,D,E)
* 301 RAMBO : Analog input 3
*
* Note: May require analog pins to be defined for other boards.
*/
//#define FILAMENT_WIDTH_SENSOR
#if ENABLED(FILAMENT_WIDTH_SENSOR)
#define FILAMENT_SENSOR_EXTRUDER_NUM 0 // Index of the extruder that has the filament sensor. :[0,1,2,3,4]
#define MEASUREMENT_DELAY_CM 14 // (cm) The distance from the filament sensor to the melting chamber
#define FILWIDTH_ERROR_MARGIN 1.0 // (mm) If a measurement differs too much from nominal width ignore it
#define MAX_MEASUREMENT_DELAY 20 // (bytes) Buffer size for stored measurements (1 byte per cm). Must be larger than MEASUREMENT_DELAY_CM.
#define DEFAULT_MEASURED_FILAMENT_DIA DEFAULT_NOMINAL_FILAMENT_DIA // Set measured to nominal initially
// Display filament width on the LCD status line. Status messages will expire after 5 seconds.
//#define FILAMENT_LCD_DISPLAY
#endif
// @section power
/**
* Power Monitor
* Monitor voltage (V) and/or current (A), and -when possible- power (W)
*
* Read and configure with M430
*
* The current sensor feeds DC voltage (relative to the measured current) to an analog pin
* The voltage sensor feeds DC voltage (relative to the measured voltage) to an analog pin
*/
//#define POWER_MONITOR_CURRENT // Monitor the system current
//#define POWER_MONITOR_VOLTAGE // Monitor the system voltage
#if ENABLED(POWER_MONITOR_CURRENT)
#define POWER_MONITOR_VOLTS_PER_AMP 0.05000 // Input voltage to the MCU analog pin per amp - DO NOT apply more than ADC_VREF!
#define POWER_MONITOR_CURRENT_OFFSET 0 // Offset (in amps) applied to the calculated current
#define POWER_MONITOR_FIXED_VOLTAGE 13.6 // Voltage for a current sensor with no voltage sensor (for power display)
#endif
#if ENABLED(POWER_MONITOR_VOLTAGE)
#define POWER_MONITOR_VOLTS_PER_VOLT 0.077933 // Input voltage to the MCU analog pin per volt - DO NOT apply more than ADC_VREF!
#define POWER_MONITOR_VOLTAGE_OFFSET 0 // Offset (in volts) applied to the calculated voltage
#endif
// @section safety
/**
* Stepper Driver Anti-SNAFU Protection
*
* If the SAFE_POWER_PIN is defined for your board, Marlin will check
* that stepper drivers are properly plugged in before applying power.
* Disable protection if your stepper drivers don't support the feature.
*/
//#define DISABLE_DRIVER_SAFE_POWER_PROTECT
// @section cnc
/**
* CNC Coordinate Systems
*
* Enables G53 and G54-G59.3 commands to select coordinate systems
* and G92.1 to reset the workspace to native machine space.
*/
//#define CNC_COORDINATE_SYSTEMS
// @section reporting
/**
* Auto-report fan speed with M123 S<seconds>
* Requires fans with tachometer pins
*/
//#define AUTO_REPORT_FANS
/**
* Auto-report temperatures with M155 S<seconds>
*/
#define AUTO_REPORT_TEMPERATURES
#if ENABLED(AUTO_REPORT_TEMPERATURES) && TEMP_SENSOR_REDUNDANT
//#define AUTO_REPORT_REDUNDANT // Include the "R" sensor in the auto-report
#endif
/**
* Auto-report position with M154 S<seconds>
*/
#define AUTO_REPORT_POSITION
#if ENABLED(AUTO_REPORT_POSITION)
//#define AUTO_REPORT_REAL_POSITION // Auto-report the real position
#endif
/**
* Include capabilities in M115 output
*/
#define EXTENDED_CAPABILITIES_REPORT
#if ENABLED(EXTENDED_CAPABILITIES_REPORT)
#define M115_GEOMETRY_REPORT
#endif
// @section security
/**
* Expected Printer Check
* Add the M16 G-code to compare a string to the MACHINE_NAME.
* M16 with a non-matching string causes the printer to halt.
*/
//#define EXPECTED_PRINTER_CHECK
// @section volumetrics
/**
* Disable all Volumetric extrusion options
*/
//#define NO_VOLUMETRICS
#if DISABLED(NO_VOLUMETRICS)
/**
* Volumetric extrusion default state
* Activate to make volumetric extrusion the default method,
* with DEFAULT_NOMINAL_FILAMENT_DIA as the default diameter.
*
* M200 D0 to disable, M200 Dn to set a new diameter (and enable volumetric).
* M200 S0/S1 to disable/enable volumetric extrusion.
*/
//#define VOLUMETRIC_DEFAULT_ON
//#define VOLUMETRIC_EXTRUDER_LIMIT
#if ENABLED(VOLUMETRIC_EXTRUDER_LIMIT)
/**
* Default volumetric extrusion limit in cubic mm per second (mm^3/sec).
* This factory setting applies to all extruders.
* Use 'M200 [T<extruder>] L<limit>' to override and 'M502' to reset.
* A non-zero value activates Volume-based Extrusion Limiting.
*/
#define DEFAULT_VOLUMETRIC_EXTRUDER_LIMIT 0.00 // (mm^3/sec)
#endif
#endif
// @section reporting
// Extra options for the M114 "Current Position" report
#define M114_DETAIL // Use 'M114` for details to check planner calculations
//#define M114_REALTIME // Real current position based on forward kinematics
//#define M114_LEGACY // M114 used to synchronize on every call. Enable if needed.
#define REPORT_FAN_CHANGE // Report the new fan speed when changed by M106 (and others)
// @section gcode
/**
* Spend 28 bytes of SRAM to optimize the G-code parser
*/
#define FASTER_GCODE_PARSER
#if ENABLED(FASTER_GCODE_PARSER)
//#define GCODE_QUOTED_STRINGS // Support for quoted string parameters
#endif
// Support for MeatPack G-code compression (https://github.com/scottmudge/OctoPrint-MeatPack)
//#define MEATPACK_ON_SERIAL_PORT_1
//#define MEATPACK_ON_SERIAL_PORT_2
//#define GCODE_CASE_INSENSITIVE // Accept G-code sent to the firmware in lowercase
//#define REPETIER_GCODE_M360 // Add commands originally from Repetier FW
/**
* Enable this option for a leaner build of Marlin that removes all
* workspace offsets, simplifying coordinate transformations, leveling, etc.
*
* - M206 and M428 are disabled.
* - G92 will revert to its behavior from Marlin 1.0.
*/
//#define NO_WORKSPACE_OFFSETS
/**
* CNC G-code options
* Support CNC-style G-code dialects used by laser cutters, drawing machine cams, etc.
* Note that G0 feedrates should be used with care for 3D printing (if used at all).
* High feedrates may cause ringing and harm print quality.
*/
//#define PAREN_COMMENTS // Support for parentheses-delimited comments
//#define GCODE_MOTION_MODES // Remember the motion mode (G0 G1 G2 G3 G5 G38.X) and apply for X Y Z E F, etc.
// Enable and set a (default) feedrate for all G0 moves
//#define G0_FEEDRATE 3000 // (mm/min)
#ifdef G0_FEEDRATE
//#define VARIABLE_G0_FEEDRATE // The G0 feedrate is set by F in G0 motion mode
#endif
// @section gcode
/**
* Startup commands
*
* Execute certain G-code commands immediately after power-on.
*/
//#define STARTUP_COMMANDS "M17 Z"
/**
* G-code Macros
*
* Add G-codes M810-M819 to define and run G-code macros.
* Macros are not saved to EEPROM.
*/
//#define GCODE_MACROS
#if ENABLED(GCODE_MACROS)
#define GCODE_MACROS_SLOTS 5 // Up to 10 may be used
#define GCODE_MACROS_SLOT_SIZE 50 // Maximum length of a single macro
#endif
/**
* User-defined menu items to run custom G-code.
* Up to 25 may be defined, but the actual number is LCD-dependent.
*/
// @section custom main menu
// Custom Menu: Main Menu
//#define CUSTOM_MENU_MAIN
#if ENABLED(CUSTOM_MENU_MAIN)
//#define CUSTOM_MENU_MAIN_TITLE "Custom Commands"
#define CUSTOM_MENU_MAIN_SCRIPT_DONE "M117 User Script Done"
#define CUSTOM_MENU_MAIN_SCRIPT_AUDIBLE_FEEDBACK
//#define CUSTOM_MENU_MAIN_SCRIPT_RETURN // Return to status screen after a script
#define CUSTOM_MENU_MAIN_ONLY_IDLE // Only show custom menu when the machine is idle
#define MAIN_MENU_ITEM_1_DESC "Home & UBL Info"
#define MAIN_MENU_ITEM_1_GCODE "G28\nG29 W"
//#define MAIN_MENU_ITEM_1_CONFIRM // Show a confirmation dialog before this action
#define MAIN_MENU_ITEM_2_DESC "Preheat for " PREHEAT_1_LABEL
#define MAIN_MENU_ITEM_2_GCODE "M140 S" STRINGIFY(PREHEAT_1_TEMP_BED) "\nM104 S" STRINGIFY(PREHEAT_1_TEMP_HOTEND)
//#define MAIN_MENU_ITEM_2_CONFIRM
//#define MAIN_MENU_ITEM_3_DESC "Preheat for " PREHEAT_2_LABEL
//#define MAIN_MENU_ITEM_3_GCODE "M140 S" STRINGIFY(PREHEAT_2_TEMP_BED) "\nM104 S" STRINGIFY(PREHEAT_2_TEMP_HOTEND)
//#define MAIN_MENU_ITEM_3_CONFIRM
//#define MAIN_MENU_ITEM_4_DESC "Heat Bed/Home/Level"
//#define MAIN_MENU_ITEM_4_GCODE "M140 S" STRINGIFY(PREHEAT_2_TEMP_BED) "\nG28\nG29"
//#define MAIN_MENU_ITEM_4_CONFIRM
//#define MAIN_MENU_ITEM_5_DESC "Home & Info"
//#define MAIN_MENU_ITEM_5_GCODE "G28\nM503"
//#define MAIN_MENU_ITEM_5_CONFIRM
#endif
// @section custom config menu
// Custom Menu: Configuration Menu
//#define CUSTOM_MENU_CONFIG
#if ENABLED(CUSTOM_MENU_CONFIG)
//#define CUSTOM_MENU_CONFIG_TITLE "Custom Commands"
#define CUSTOM_MENU_CONFIG_SCRIPT_DONE "M117 Wireless Script Done"
#define CUSTOM_MENU_CONFIG_SCRIPT_AUDIBLE_FEEDBACK
//#define CUSTOM_MENU_CONFIG_SCRIPT_RETURN // Return to status screen after a script
#define CUSTOM_MENU_CONFIG_ONLY_IDLE // Only show custom menu when the machine is idle
#define CONFIG_MENU_ITEM_1_DESC "Wifi ON"
#define CONFIG_MENU_ITEM_1_GCODE "M118 [ESP110] WIFI-STA pwd=12345678"
//#define CONFIG_MENU_ITEM_1_CONFIRM // Show a confirmation dialog before this action
#define CONFIG_MENU_ITEM_2_DESC "Bluetooth ON"
#define CONFIG_MENU_ITEM_2_GCODE "M118 [ESP110] BT pwd=12345678"
//#define CONFIG_MENU_ITEM_2_CONFIRM
//#define CONFIG_MENU_ITEM_3_DESC "Radio OFF"
//#define CONFIG_MENU_ITEM_3_GCODE "M118 [ESP110] OFF pwd=12345678"
//#define CONFIG_MENU_ITEM_3_CONFIRM
//#define CONFIG_MENU_ITEM_4_DESC "Wifi ????"
//#define CONFIG_MENU_ITEM_4_GCODE "M118 ????"
//#define CONFIG_MENU_ITEM_4_CONFIRM
//#define CONFIG_MENU_ITEM_5_DESC "Wifi ????"
//#define CONFIG_MENU_ITEM_5_GCODE "M118 ????"
//#define CONFIG_MENU_ITEM_5_CONFIRM
#endif
// @section custom buttons
/**
* User-defined buttons to run custom G-code.
* Up to 25 may be defined.
*/
//#define CUSTOM_USER_BUTTONS
#if ENABLED(CUSTOM_USER_BUTTONS)
//#define BUTTON1_PIN -1
#if PIN_EXISTS(BUTTON1)
#define BUTTON1_HIT_STATE LOW // State of the triggered button. NC=LOW. NO=HIGH.
#define BUTTON1_WHEN_PRINTING false // Button allowed to trigger during printing?
#define BUTTON1_GCODE "G28"
#define BUTTON1_DESC "Homing" // Optional string to set the LCD status
#endif
//#define BUTTON2_PIN -1
#if PIN_EXISTS(BUTTON2)
#define BUTTON2_HIT_STATE LOW
#define BUTTON2_WHEN_PRINTING false
#define BUTTON2_GCODE "M140 S" STRINGIFY(PREHEAT_1_TEMP_BED) "\nM104 S" STRINGIFY(PREHEAT_1_TEMP_HOTEND)
#define BUTTON2_DESC "Preheat for " PREHEAT_1_LABEL
#endif
//#define BUTTON3_PIN -1
#if PIN_EXISTS(BUTTON3)
#define BUTTON3_HIT_STATE LOW
#define BUTTON3_WHEN_PRINTING false
#define BUTTON3_GCODE "M140 S" STRINGIFY(PREHEAT_2_TEMP_BED) "\nM104 S" STRINGIFY(PREHEAT_2_TEMP_HOTEND)
#define BUTTON3_DESC "Preheat for " PREHEAT_2_LABEL
#endif
#endif
// @section host
/**
* Host Action Commands
*
* Define host streamer action commands in compliance with the standard.
*
* See https://reprap.org/wiki/G-code#Action_commands
* Common commands ........ poweroff, pause, paused, resume, resumed, cancel
* G29_RETRY_AND_RECOVER .. probe_rewipe, probe_failed
*
* Some features add reason codes to extend these commands.
*
* Host Prompt Support enables Marlin to use the host for user prompts so
* filament runout and other processes can be managed from the host side.
*/
#define HOST_ACTION_COMMANDS
#if ENABLED(HOST_ACTION_COMMANDS)
//#define HOST_PAUSE_M76 // Tell the host to pause in response to M76
#define HOST_PROMPT_SUPPORT // Initiate host prompts to get user feedback
#if ENABLED(HOST_PROMPT_SUPPORT)
#define HOST_STATUS_NOTIFICATIONS // Send some status messages to the host as notifications
#endif
//#define HOST_START_MENU_ITEM // Add a menu item that tells the host to start
//#define HOST_SHUTDOWN_MENU_ITEM // Add a menu item that tells the host to shut down
#endif
// @section extras
/**
* Cancel Objects
*
* Implement M486 to allow Marlin to skip objects
*/
//#define CANCEL_OBJECTS
#if ENABLED(CANCEL_OBJECTS)
#define CANCEL_OBJECTS_REPORTING // Emit the current object as a status message
#endif
/**
* I2C position encoders for closed loop control.
* Developed by Chris Barr at Aus3D.
*
* Wiki: https://wiki.aus3d.com.au/Magnetic_Encoder
* Github: https://github.com/Aus3D/MagneticEncoder
*
* Supplier: https://aus3d.com.au/magnetic-encoder-module
* Alternative Supplier: https://reliabuild3d.com/
*
* Reliabuild encoders have been modified to improve reliability.
* @section i2c encoders
*/
//#define I2C_POSITION_ENCODERS
#if ENABLED(I2C_POSITION_ENCODERS)
#define I2CPE_ENCODER_CNT 1 // The number of encoders installed; max of 5
// encoders supported currently.
#define I2CPE_ENC_1_ADDR I2CPE_PRESET_ADDR_X // I2C address of the encoder. 30-200.
#define I2CPE_ENC_1_AXIS X_AXIS // Axis the encoder module is installed on. <X|Y|Z|E>_AXIS.
#define I2CPE_ENC_1_TYPE I2CPE_ENC_TYPE_LINEAR // Type of encoder: I2CPE_ENC_TYPE_LINEAR -or-
// I2CPE_ENC_TYPE_ROTARY.
#define I2CPE_ENC_1_TICKS_UNIT 2048 // 1024 for magnetic strips with 2mm poles; 2048 for
// 1mm poles. For linear encoders this is ticks / mm,
// for rotary encoders this is ticks / revolution.
//#define I2CPE_ENC_1_TICKS_REV (16 * 200) // Only needed for rotary encoders; number of stepper
// steps per full revolution (motor steps/rev * microstepping)
//#define I2CPE_ENC_1_INVERT // Invert the direction of axis travel.
#define I2CPE_ENC_1_EC_METHOD I2CPE_ECM_MICROSTEP // Type of error error correction.
#define I2CPE_ENC_1_EC_THRESH 0.10 // Threshold size for error (in mm) above which the
// printer will attempt to correct the error; errors
// smaller than this are ignored to minimize effects of
// measurement noise / latency (filter).
#define I2CPE_ENC_2_ADDR I2CPE_PRESET_ADDR_Y // Same as above, but for encoder 2.
#define I2CPE_ENC_2_AXIS Y_AXIS
#define I2CPE_ENC_2_TYPE I2CPE_ENC_TYPE_LINEAR
#define I2CPE_ENC_2_TICKS_UNIT 2048
//#define I2CPE_ENC_2_TICKS_REV (16 * 200)
//#define I2CPE_ENC_2_INVERT
#define I2CPE_ENC_2_EC_METHOD I2CPE_ECM_MICROSTEP
#define I2CPE_ENC_2_EC_THRESH 0.10
#define I2CPE_ENC_3_ADDR I2CPE_PRESET_ADDR_Z // Encoder 3. Add additional configuration options
#define I2CPE_ENC_3_AXIS Z_AXIS // as above, or use defaults below.
#define I2CPE_ENC_4_ADDR I2CPE_PRESET_ADDR_E // Encoder 4.
#define I2CPE_ENC_4_AXIS E_AXIS
#define I2CPE_ENC_5_ADDR 34 // Encoder 5.
#define I2CPE_ENC_5_AXIS E_AXIS
// Default settings for encoders which are enabled, but without settings configured above.
#define I2CPE_DEF_TYPE I2CPE_ENC_TYPE_LINEAR
#define I2CPE_DEF_ENC_TICKS_UNIT 2048
#define I2CPE_DEF_TICKS_REV (16 * 200)
#define I2CPE_DEF_EC_METHOD I2CPE_ECM_NONE
#define I2CPE_DEF_EC_THRESH 0.1
//#define I2CPE_ERR_THRESH_ABORT 100.0 // Threshold size for error (in mm) error on any given
// axis after which the printer will abort. Comment out to
// disable abort behavior.
#define I2CPE_TIME_TRUSTED 10000 // After an encoder fault, there must be no further fault
// for this amount of time (in ms) before the encoder
// is trusted again.
/**
* Position is checked every time a new command is executed from the buffer but during long moves,
* this setting determines the minimum update time between checks. A value of 100 works well with
* error rolling average when attempting to correct only for skips and not for vibration.
*/
#define I2CPE_MIN_UPD_TIME_MS 4 // (ms) Minimum time between encoder checks.
// Use a rolling average to identify persistent errors that indicate skips, as opposed to vibration and noise.
#define I2CPE_ERR_ROLLING_AVERAGE
#endif // I2C_POSITION_ENCODERS
/**
* Analog Joystick(s)
* @section joystick
*/
//#define JOYSTICK
#if ENABLED(JOYSTICK)
#define JOY_X_PIN 5 // RAMPS: Suggested pin A5 on AUX2
#define JOY_Y_PIN 10 // RAMPS: Suggested pin A10 on AUX2
#define JOY_Z_PIN 12 // RAMPS: Suggested pin A12 on AUX2
#define JOY_EN_PIN 44 // RAMPS: Suggested pin D44 on AUX2
//#define INVERT_JOY_X // Enable if X direction is reversed
//#define INVERT_JOY_Y // Enable if Y direction is reversed
//#define INVERT_JOY_Z // Enable if Z direction is reversed
// Use M119 with JOYSTICK_DEBUG to find reasonable values after connecting:
#define JOY_X_LIMITS { 5600, 8190-100, 8190+100, 10800 } // min, deadzone start, deadzone end, max
#define JOY_Y_LIMITS { 5600, 8250-100, 8250+100, 11000 }
#define JOY_Z_LIMITS { 4800, 8080-100, 8080+100, 11550 }
//#define JOYSTICK_DEBUG
#endif
/**
* Mechanical Gantry Calibration
* Modern replacement for the Průša TMC_Z_CALIBRATION.
* Adds capability to work with any adjustable current drivers.
* Implemented as G34 because M915 is deprecated.
* @section calibrate
*/
//#define MECHANICAL_GANTRY_CALIBRATION
#if ENABLED(MECHANICAL_GANTRY_CALIBRATION)
#define GANTRY_CALIBRATION_CURRENT 600 // Default calibration current in ma
#define GANTRY_CALIBRATION_EXTRA_HEIGHT 15 // Extra distance in mm past Z_###_POS to move
#define GANTRY_CALIBRATION_FEEDRATE 500 // Feedrate for correction move
//#define GANTRY_CALIBRATION_TO_MIN // Enable to calibrate Z in the MIN direction
//#define GANTRY_CALIBRATION_SAFE_POSITION XY_CENTER // Safe position for nozzle
//#define GANTRY_CALIBRATION_XY_PARK_FEEDRATE 3000 // XY Park Feedrate - MMM
//#define GANTRY_CALIBRATION_COMMANDS_PRE ""
#define GANTRY_CALIBRATION_COMMANDS_POST "G28" // G28 highly recommended to ensure an accurate position
#endif
/**
* Instant freeze / unfreeze functionality
* Potentially useful for emergency stop that allows being resumed.
* @section interface
*/
//#define FREEZE_FEATURE
#if ENABLED(FREEZE_FEATURE)
//#define FREEZE_PIN 41 // Override the default (KILL) pin here
#define FREEZE_STATE LOW // State of pin indicating freeze
#endif
/**
* MAX7219 Debug Matrix
*
* Add support for a low-cost 8x8 LED Matrix based on the Max7219 chip as a realtime status display.
* Requires 3 signal wires. Some useful debug options are included to demonstrate its usage.
* @section debug matrix
*/
//#define MAX7219_DEBUG
#if ENABLED(MAX7219_DEBUG)
#define MAX7219_CLK_PIN 64
#define MAX7219_DIN_PIN 57
#define MAX7219_LOAD_PIN 44
//#define MAX7219_GCODE // Add the M7219 G-code to control the LED matrix
#define MAX7219_INIT_TEST 2 // Test pattern at startup: 0=none, 1=sweep, 2=spiral
#define MAX7219_NUMBER_UNITS 1 // Number of Max7219 units in chain.
#define MAX7219_ROTATE 0 // Rotate the display clockwise (in multiples of +/- 90°)
// connector at: right=0 bottom=-90 top=90 left=180
//#define MAX7219_REVERSE_ORDER // The order of the LED matrix units may be reversed
//#define MAX7219_REVERSE_EACH // The LEDs in each matrix unit row may be reversed
//#define MAX7219_SIDE_BY_SIDE // Big chip+matrix boards can be chained side-by-side
/**
* Sample debug features
* If you add more debug displays, be careful to avoid conflicts!
*/
#define MAX7219_DEBUG_PRINTER_ALIVE // Blink corner LED of 8x8 matrix to show that the firmware is functioning
#define MAX7219_DEBUG_PLANNER_HEAD 2 // Show the planner queue head position on this and the next LED matrix row
#define MAX7219_DEBUG_PLANNER_TAIL 4 // Show the planner queue tail position on this and the next LED matrix row
#define MAX7219_DEBUG_PLANNER_QUEUE 0 // Show the current planner queue depth on this and the next LED matrix row
// If you experience stuttering, reboots, etc. this option can reveal how
// tweaks made to the configuration are affecting the printer in real-time.
#define MAX7219_DEBUG_PROFILE 6 // Display the fraction of CPU time spent in profiled code on this LED matrix
// row. By default idle() is profiled so this shows how "idle" the processor is.
// See class CodeProfiler.
//#define MAX7219_DEBUG_MULTISTEPPING 6 // Show multi-stepping 1 to 128 on this LED matrix row.
#endif
/**
* NanoDLP Sync support
*
* Support for Synchronized Z moves when used with NanoDLP. G0/G1 axis moves will
* output a "Z_move_comp" string to enable synchronization with DLP projector exposure.
* This feature allows you to use [[WaitForDoneMessage]] instead of M400 commands.
* @section nanodlp
*/
//#define NANODLP_Z_SYNC
#if ENABLED(NANODLP_Z_SYNC)
//#define NANODLP_ALL_AXIS // Send a "Z_move_comp" report for any axis move (not just Z).
#endif
/**
* Ethernet. Use M552 to enable and set the IP address.
* @section network
*/
#if HAS_ETHERNET
#define MAC_ADDRESS { 0xDE, 0xAD, 0xBE, 0xEF, 0xF0, 0x0D } // A MAC address unique to your network
#endif
/**
* WiFi Support (Espressif ESP32 WiFi)
*/
//#define WIFISUPPORT // Marlin embedded WiFi management
//#define ESP3D_WIFISUPPORT // ESP3D Library WiFi management (https://github.com/luc-github/ESP3DLib)
#if ANY(WIFISUPPORT, ESP3D_WIFISUPPORT)
//#define WEBSUPPORT // Start a webserver (which may include auto-discovery)
//#define OTASUPPORT // Support over-the-air firmware updates
//#define WIFI_CUSTOM_COMMAND // Accept feature config commands (e.g., WiFi ESP3D) from the host
/**
* To set a default WiFi SSID / Password, create a file called Configuration_Secure.h with
* the following defines, customized for your network. This specific file is excluded via
* .gitignore to prevent it from accidentally leaking to the public.
*
* #define WIFI_SSID "WiFi SSID"
* #define WIFI_PWD "WiFi Password"
*/
//#include "Configuration_Secure.h" // External file with WiFi SSID / Password
#endif
// @section multi-material
/**
* Průša Multi-Material Unit (MMU)
* Enable in Configuration.h
*
* These devices allow a single stepper driver on the board to drive
* multi-material feeders with any number of stepper motors.
*/
#if HAS_PRUSA_MMU1
/**
* This option only allows the multiplexer to switch on tool-change.
* Additional options to configure custom E moves are pending.
*
* Override the default DIO selector pins here, if needed.
* Some pins files may provide defaults for these pins.
*/
//#define E_MUX0_PIN 40 // Always Required
//#define E_MUX1_PIN 42 // Needed for 3 to 8 inputs
//#define E_MUX2_PIN 44 // Needed for 5 to 8 inputs
#elif HAS_PRUSA_MMU2
// Serial port used for communication with MMU2.
#define MMU2_SERIAL_PORT 2
// Use hardware reset for MMU if a pin is defined for it
//#define MMU2_RST_PIN 23
// Enable if the MMU2 has 12V stepper motors (MMU2 Firmware 1.0.2 and up)
//#define MMU2_MODE_12V
// G-code to execute when MMU2 F.I.N.D.A. probe detects filament runout
#define MMU2_FILAMENT_RUNOUT_SCRIPT "M600"
// Add an LCD menu for MMU2
//#define MMU2_MENUS
// Settings for filament load / unload from the LCD menu.
// This is for Průša MK3-style extruders. Customize for your hardware.
#define MMU2_FILAMENTCHANGE_EJECT_FEED 80.0
#define MMU2_LOAD_TO_NOZZLE_SEQUENCE \
{ 7.2, 1145 }, \
{ 14.4, 871 }, \
{ 36.0, 1393 }, \
{ 14.4, 871 }, \
{ 50.0, 198 }
#define MMU2_RAMMING_SEQUENCE \
{ 1.0, 1000 }, \
{ 1.0, 1500 }, \
{ 2.0, 2000 }, \
{ 1.5, 3000 }, \
{ 2.5, 4000 }, \
{ -15.0, 5000 }, \
{ -14.0, 1200 }, \
{ -6.0, 600 }, \
{ 10.0, 700 }, \
{ -10.0, 400 }, \
{ -50.0, 2000 }
/**
* Using a sensor like the MMU2S
* This mode requires a MK3S extruder with a sensor at the extruder idler, like the MMU2S.
* See https://help.prusa3d.com/en/guide/3b-mk3s-mk2-5s-extruder-upgrade_41560, step 11
*/
#if HAS_PRUSA_MMU2S
#define MMU2_C0_RETRY 5 // Number of retries (total time = timeout*retries)
#define MMU2_CAN_LOAD_FEEDRATE 800 // (mm/min)
#define MMU2_CAN_LOAD_SEQUENCE \
{ 0.1, MMU2_CAN_LOAD_FEEDRATE }, \
{ 60.0, MMU2_CAN_LOAD_FEEDRATE }, \
{ -52.0, MMU2_CAN_LOAD_FEEDRATE }
#define MMU2_CAN_LOAD_RETRACT 6.0 // (mm) Keep under the distance between Load Sequence values
#define MMU2_CAN_LOAD_DEVIATION 0.8 // (mm) Acceptable deviation
#define MMU2_CAN_LOAD_INCREMENT 0.2 // (mm) To reuse within MMU2 module
#define MMU2_CAN_LOAD_INCREMENT_SEQUENCE \
{ -MMU2_CAN_LOAD_INCREMENT, MMU2_CAN_LOAD_FEEDRATE }
// Continue unloading if sensor detects filament after the initial unload move
//#define MMU_IR_UNLOAD_MOVE
#else
/**
* MMU1 Extruder Sensor
*
* Support for a Průša (or other) IR Sensor to detect filament near the extruder
* and make loading more reliable. Suitable for an extruder equipped with a filament
* sensor less than 38mm from the gears.
*
* During loading the extruder will stop when the sensor is triggered, then do a last
* move up to the gears. If no filament is detected, the MMU2 can make some more attempts.
* If all attempts fail, a filament runout will be triggered.
*/
//#define MMU_EXTRUDER_SENSOR
#if ENABLED(MMU_EXTRUDER_SENSOR)
#define MMU_LOADING_ATTEMPTS_NR 5 // max. number of attempts to load filament if first load fail
#endif
#endif
//#define MMU2_DEBUG // Write debug info to serial output
#endif // HAS_PRUSA_MMU2
/**
* Advanced Print Counter settings
* @section stats
*/
#if ENABLED(PRINTCOUNTER)
#define SERVICE_WARNING_BUZZES 3
// Activate up to 3 service interval watchdogs
//#define SERVICE_NAME_1 "Service S"
//#define SERVICE_INTERVAL_1 100 // print hours
//#define SERVICE_NAME_2 "Service L"
//#define SERVICE_INTERVAL_2 200 // print hours
//#define SERVICE_NAME_3 "Service 3"
//#define SERVICE_INTERVAL_3 1 // print hours
#endif
// @section develop
//
// M100 Free Memory Watcher to debug memory usage
//
//#define M100_FREE_MEMORY_WATCHER
//
// M42 - Set pin states
//
//#define DIRECT_PIN_CONTROL
//
// M43 - display pin status, toggle pins, watch pins, watch endstops & toggle LED, test servo probe
//
//#define PINS_DEBUGGING
// Enable Tests that will run at startup and produce a report
//#define MARLIN_TEST_BUILD
// Enable Marlin dev mode which adds some special commands
//#define MARLIN_DEV_MODE
#if ENABLED(MARLIN_DEV_MODE)
/**
* D576 - Buffer Monitoring
* To help diagnose print quality issues stemming from empty command buffers.
*/
//#define BUFFER_MONITORING
#endif
/**
* Postmortem Debugging captures misbehavior and outputs the CPU status and backtrace to serial.
* When running in the debugger it will break for debugging. This is useful to help understand
* a crash from a remote location. Requires ~400 bytes of SRAM and 5Kb of flash.
*/
//#define POSTMORTEM_DEBUGGING
/**
* Software Reset options
*/
//#define SOFT_RESET_VIA_SERIAL // 'KILL' and '^X' commands will soft-reset the controller
//#define SOFT_RESET_ON_KILL // Use a digital button to soft-reset the controller after KILL
// Report uncleaned reset reason from register r2 instead of MCUSR. Supported by Optiboot on AVR.
//#define OPTIBOOT_RESET_REASON
Actually getting it to work
Once I finally had the thing functional from a firmware and mechanical standpoint it turns out it still did approximately nothing. If I went into the menu and went to movement and went to ABL and hit start it would do all the mesh creation steps, probing the bed in many places and all that, however once complete it seemed to have no effect on the prints. I messed around with a lot of options to try to make it work but what finally seemed to make the difference was adding a gcode line in my slicer.
M420 S1 L0 Z10.00
I use Cura so I went into the printer profile and in machine settings I added that code to the end of the start gcode. M420 is the bed leveling options. S1 enables it. L0 tells it to load mesh profile 0. And Z10.00 tells the printer to gradually straighten out the layers arriving at truly flat in 10mm. Once I did that I did a single layer test print, snatched from TeachingTech’s website, and printed it and it looked terrible but consistent at least.
Z Probe Offset
The next issue was the Z probe offset value, NOZZLE_TO_PROBE_OFFSET, seemed to have no impact. No matter what I set it to the single layer test looked exactly the same. Apparently #define BABYSTEP_ZPROBE_OFFSET in the configuration_adv.h file must be uncommented to get the other probe offset value to actually work. I don’t really know what this does or why but once I turned that on and reloaded my firmware for the 87,000th time it started working.
Unfortunately I had my offset value set very extreme from my testing prior so my next test print was even worse. I had the offset set to -2.87 which means after probing the Z access to home, then offsetting the coordinates mesh offset the printer then moved the nozzle down 2.87mm. The correct offset, found after even more testing, is more like -0.85 which means the printer jammed the nozzle 2mm into the bed. Fortunately nothing broke despite the additional upgrade of solid silicone bed standoffs/removing the bed springs.
Bed Leveling
Alright so now auto-bed leveling is enabled and working. One other really useful thing you can do with this is run the bed visualizer in OctoPrint. I think I mentioned we’re also running octoprint now in part 2. Anyway if you run the bed visualizer you can see exactly where the bed is low and where it is high. I recommend trying to get this close to flat even with ABL. My bed had an almost 3mm variance from left to right. Half a turn of the front and back bed screw on the left side and this variance dropped to 0.5mm, much better.
If you don’t do this remember your bottom layers of every print are going to have that variance baked in to the print by the ABL as it comes up to flat. That’s not good in my book.
Enclosure
You might have noticed I have also added an enclosure. It’s very convenient because if you forget what it is it says “Enclosure” in giant letters across the front. All jokes aside I was tired of some of the limitations an open air printer causes. With the enclosure I should be able to print ABS with much less warping, as well as some other finicky stuff, nylon maybe. The printer is still in my lab/office so I’ll probably still stay away from stuff that off gases neurotoxins.
One downside is the enclosure is just a tad short for the bed a 300mm deep bed slinger basically runs that bed in and out like 700mm. There’s enough flex that it can still make the full range but it does shove the bed into the front of the enclosure and I worry it will cause a skipped step at some point. Oh well.
Filament Runout
Last time I complained about the Creality Filament Runout sensor throwing constant false positives. I stand by those complaints. According to Creality you should configure the runout sensor to trigger after 7mm of filament have failed to passthrough the sensor after the controller requests it (at least that’s how I believe this sensor works). This line in configuration.h: FILAMENT_RUNOUT_DISTANCE_MM.
As far as I’m concerned that value is incorrect. I cranked this up to 25mm and guess what? It works great now. No false positives but I can still use it to runout old almost empty rolls and of course detect actual issues. I don’t understand why they recommended such a touchy setting. Anyway, get one of these, ASAP.
Dry Boxes
You may have also noticed I put a shelf up above the printers. Fun fact, I got to put the same shelf up multiple times in nearly the exact same place. The new enclosure was about 1/4 of an inch taller than the underside of the shelf, great. So a few more holes in the wall and some more juggling drill, screws, shelf brackets, shelf, and a level and bam, it’s up.
Of course the purpose of the shelf was a better place to put the filament spools. You might have noticed all my new fancy dry boxes as well. Get them HERE. They might be just a touch small. I also got a big jug of desiccant beads. The idea is you pour beads in the bottom, drop in the filament, run the filament end out the PTFE connector, through the tube, down to the printer.
So far this doesn’t work. There is too much tension on the spool in the box so they’re just storage for now. I’m working on designing a spool roller which should solve this but it’s a little tricky because the spool is almost the exact same with as the bottom of the box. A little bigger would’ve helped a lot. I’ll post my roller design once I get it working. You might also wonder, “isn’t it a nightmare to push the filament through all that tube down to the printer just to load the filament?”. It sure is.
Dryer Dry Box
And yet another upgrade to the station. An actual dryer box. The box on the end actually has heat and fans and a timer and stuff to actively dry filament but it’s not just a dehydrator, it also has rollers for the spools in it. You can have two rolls in it at once and feed the filament out a port in the chamber and to your printer. Pretty slick.
Filament Storage
Lastly the new filament storage bins under the bench. I had the slightly smaller one on the end already and two even smaller ones next to it. I just got the great big 69qt bins to the left. They were supposed to be the same size as the one on the right but they’ve apparently changed the shape of the bin, kind of annoying, but oh well. They were something like 60% off so I had to do it. I was out of room for partial spools before. The things are normally kind of expensive. Of course I also dumped a pound of desiccant into the bottom of each to keep the filament nice and dry.
Bye
Well that’s all for now. Maybe I’ll post some prints and stuff in the near future to show off the actual results. We’ll see. As always subscribe below to get updates on posts and feel free to post a comment if you have questions, I’ll try to help.
Oh yeah, one more thing. I picked up a Creality resin printer on a prime day deal for stupid cheap. I haven’t set it up yet but I’ll probably say something about it once I do so keep an eye out for that.